Poster
in
Workshop: Bayesian Decision-making and Uncertainty: from probabilistic and spatiotemporal modeling to sequential experiment design
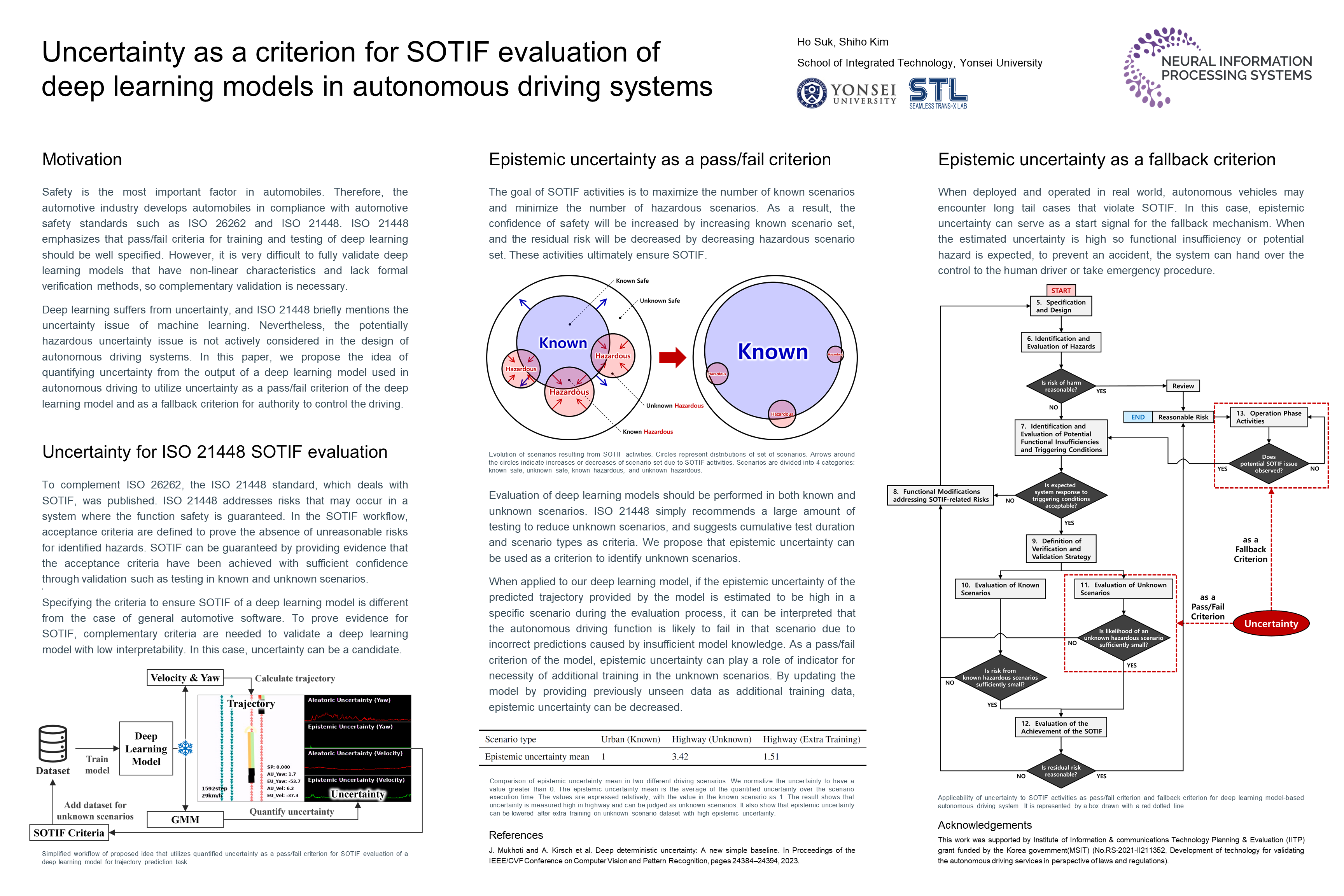
Uncertainty as a criterion for SOTIF evaluation of deep learning models in autonomous driving systems
Ho Suk
Keywords: [ autonomous driving ] [ Safety of the intended functionality ] [ Evaluation criteria ] [ uncertainty quantification ]
{kind=link}
Ensuring the safety of deep learning models in autonomous driving systems is crucial. In compliance with the automotive safety standard ISO 21448, we propose uncertainty as a new complementary evaluation criterion to ensure the safety of the intended functionality (SOTIF) of deep learning-based systems. To evaluate and improve the trajectory prediction function of autonomous driving systems, we utilize epistemic uncertainty, quantified by a single forward pass model with consideration for constraints on resources and response time, as a criterion. Experimental results with data collected from the CARLA simulator demonstrate that uncertainty criterion can detect functional insuffiencies in unknown driving scenarios which potentially hazardous, and eventually induce extra learning.