Spotlight Poster
Human-Aware Vision-and-Language Navigation: Bridging Simulation to Reality with Dynamic Human Interactions
Heng Li · Minghan Li · Zhi-Qi Cheng · Yifei Dong · Yuxuan Zhou · Jun-Yan He · Qi Dai · Teruko Mitamura · Alexander Hauptmann
East Exhibit Hall A-C #4106
{kind=link}
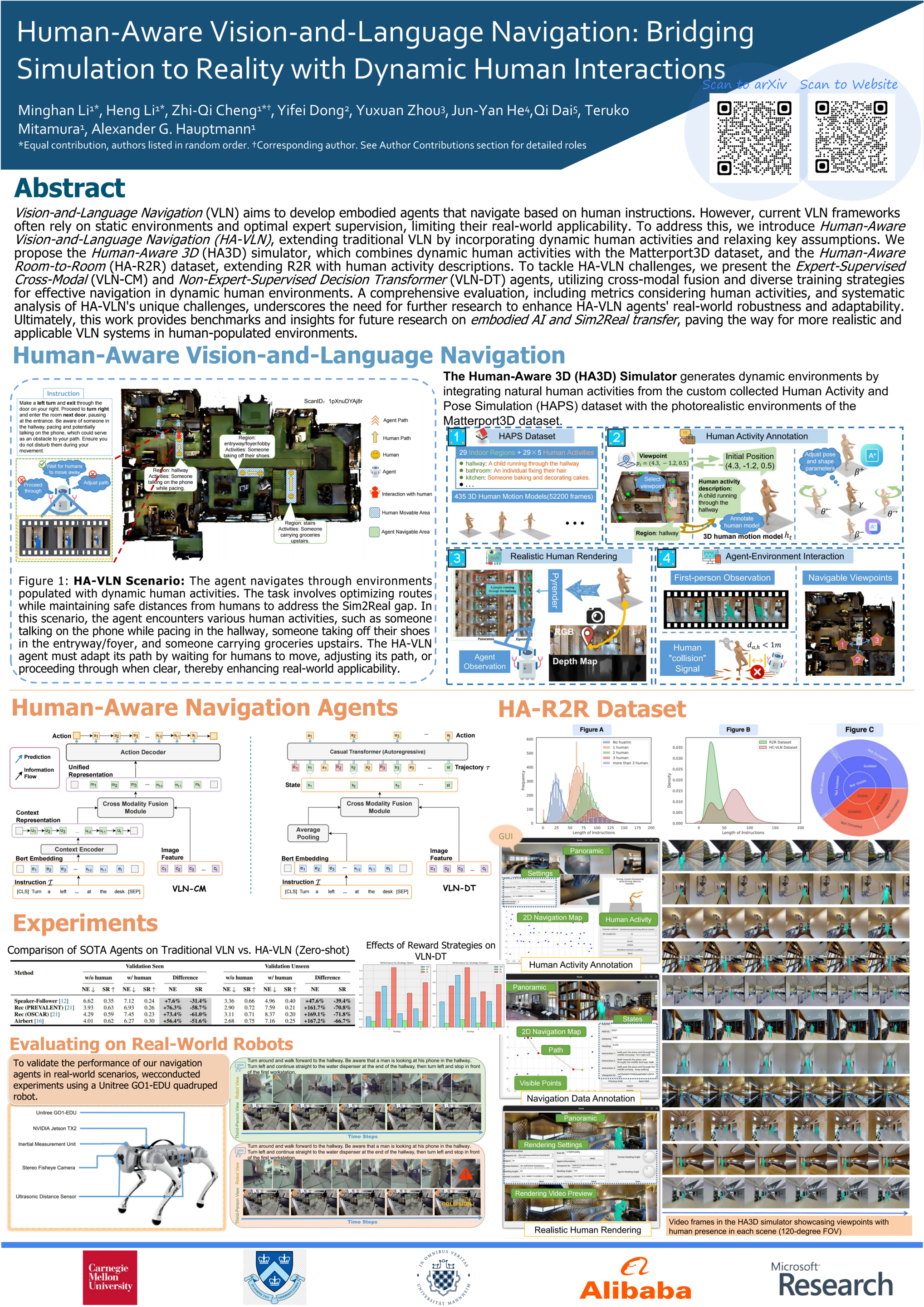
Vision-and-Language Navigation (VLN) aims to develop embodied agents that navigate based on human instructions. However, current VLN frameworks often rely on static environments and optimal expert supervision, limiting their real-world applicability. To address this, we introduce Human-Aware Vision-and-Language Navigation (HA-VLN), extending traditional VLN by incorporating dynamic human activities and relaxing key assumptions. We propose the Human-Aware 3D (HA3D) simulator, which combines dynamic human activities with the Matterport3D dataset, and the Human-Aware Room-to-Room (HA-R2R) dataset, extending R2R with human activity descriptions. To tackle HA-VLN challenges, we present the Expert-Supervised Cross-Modal (VLN-CM) and Non-Expert-Supervised Decision Transformer (VLN-DT) agents, utilizing cross-modal fusion and diverse training strategies for effective navigation in dynamic human environments. A comprehensive evaluation, including metrics considering human activities, and systematic analysis of HA-VLN's unique challenges, underscores the need for further research to enhance HA-VLN agents' real-world robustness and adaptability. Ultimately, this work provides benchmarks and insights for future research on embodied AI and Sim2Real transfer, paving the way for more realistic and applicable VLN systems in human-populated environments.