Poster
OpenSatMap: A Fine-grained High-resolution Satellite Dataset for Large-scale Map Construction
Hongbo Zhao · Lue Fan · Yuntao Chen · Haochen Wang · yuran Yang · Xiaojuan Jin · YIXIN ZHANG · GAOFENG MENG · ZHAO-XIANG ZHANG
West Ballroom A-D #5209
{kind=link}
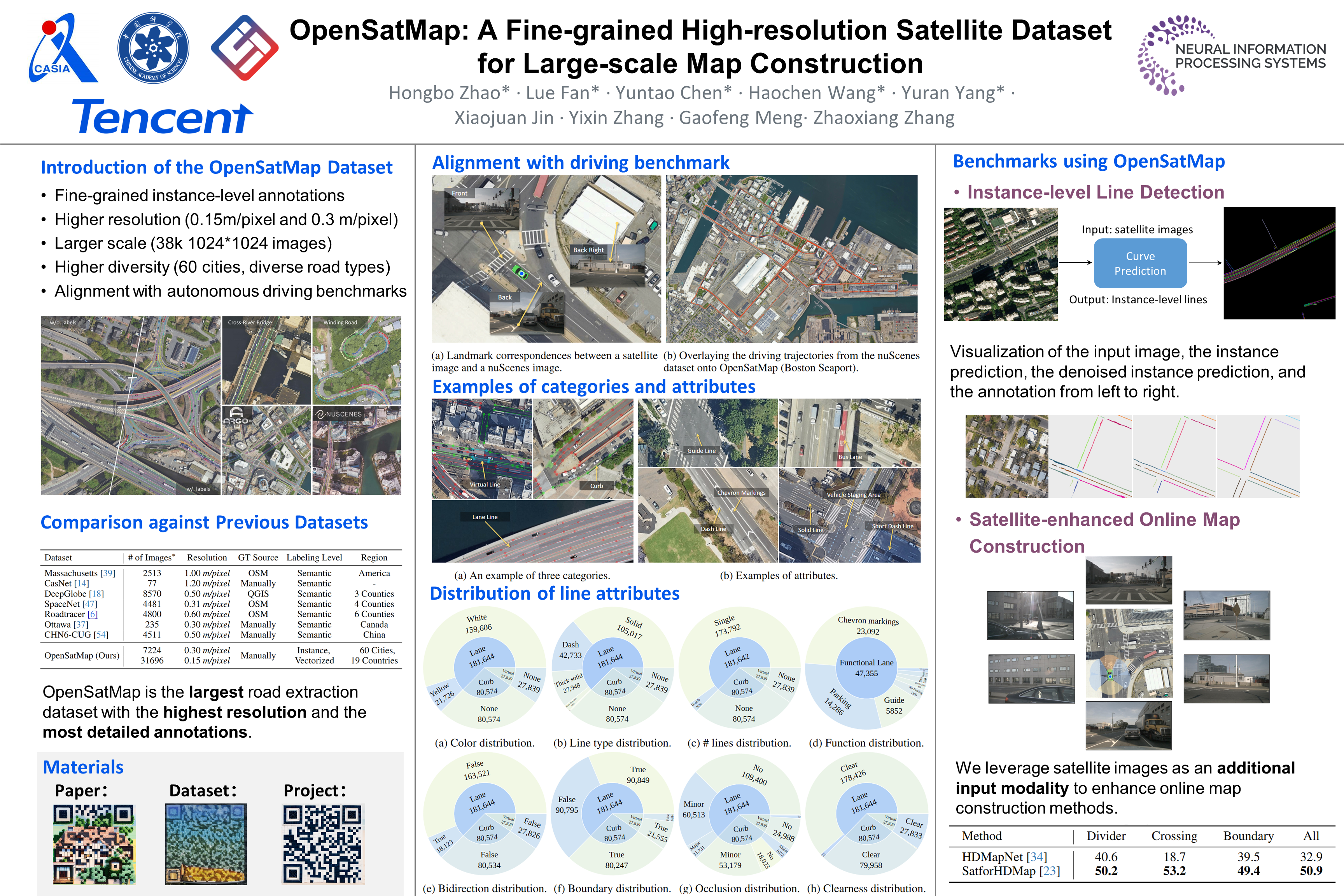
In this paper, we propose OpenSatMap, a fine-grained, high-resolution satellite dataset for large-scale map construction. Map construction is one of the foundations of the transportation industry, such as navigation and autonomous driving. Extracting road structures from satellite images is an efficient way to construct large-scale maps. However, existing satellite datasets provide only coarse semantic-level labels with a relatively low resolution (up to level 19), impeding the advancement of this field. In contrast, the proposed OpenSatMap (1) has fine-grained instance-level annotations; (2) consists of high-resolution images (level 20); (3) is currently the largest one of its kind; (4) collects data with high diversity. Moreover, OpenSatMap covers and aligns with the popular nuScenes dataset and Argoverse 2 dataset to potentially advance autonomous driving technologies. By publishing and maintaining the dataset, we provide a high-quality benchmark for satellite-based map construction and downstream tasks like autonomous driving.