Poster
Voxel Proposal Network via Multi-Frame Knowledge Distillation for Semantic Scene Completion
Lubo Wang · Di Lin · Kairui Yang · Ruonan Liu · Qing Guo · Wuyuan Xie · Miaohui Wang · Lingyu Liang · Yi Wang · Ping Li
East Exhibit Hall A-C #1209
{kind=link}
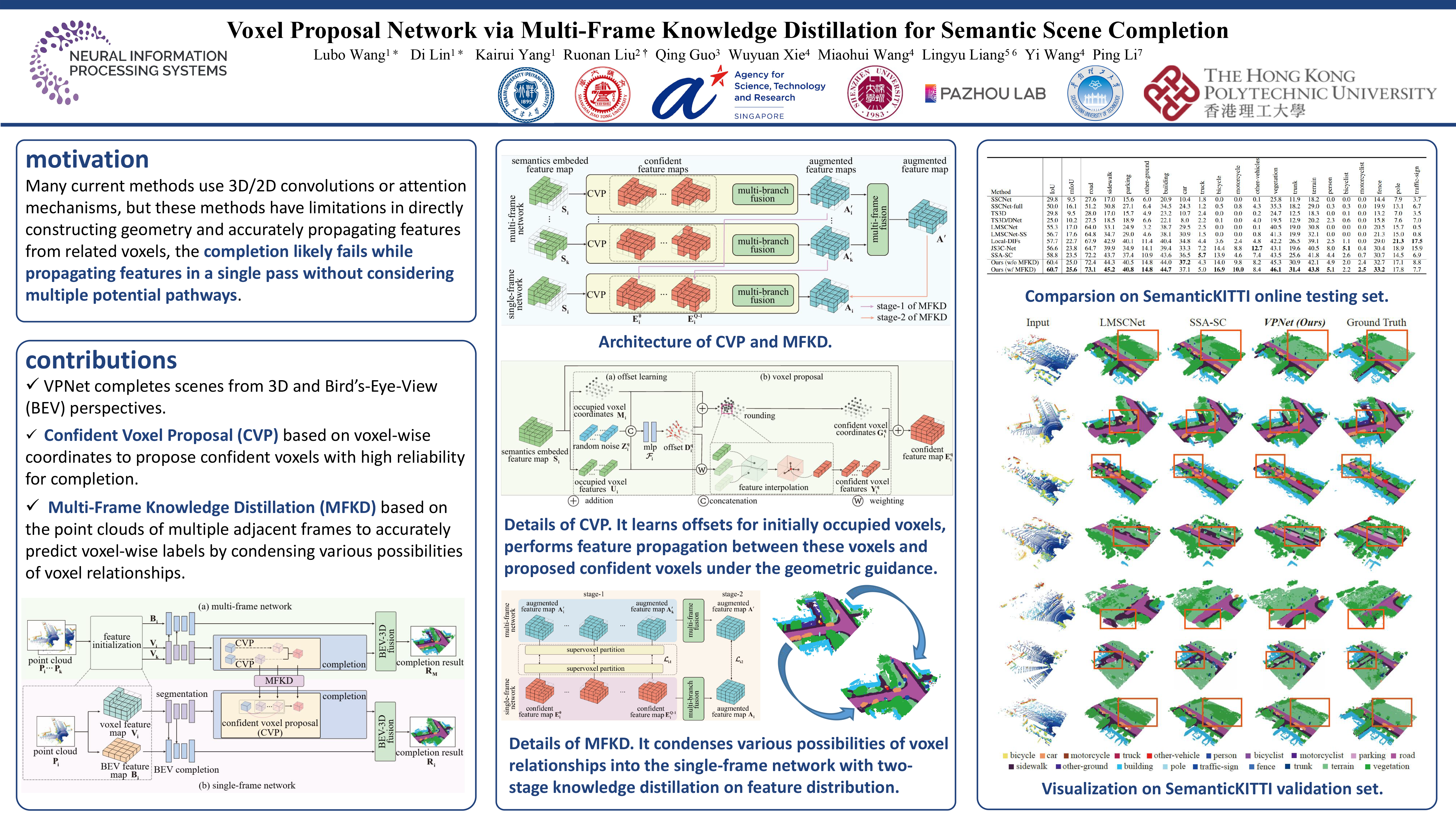
Semantic scene completion is a difficult task that involves completing the geometry and semantics of a scene from point clouds in a large-scale environment. Many current methods use 3D/2D convolutions or attention mechanisms, but these have limitations in directly constructing geometry and accurately propagating features from related voxels, the completion likely fails while propagating features in a single pass without considering multiple potential pathways. And they are generally only suitable for static scenes and struggle to handle dynamic aspects. This paper introduces Voxel Proposal Network (VPNet) that completes scenes from 3D and Bird's-Eye-View (BEV) perspectives. It includes Confident Voxel Proposal based on voxel-wise coordinates to propose confident voxels with high reliability for completion. This method reconstructs the scene geometry and implicitly models the uncertainty of voxel-wise semantic labels by presenting multiple possibilities for voxels. VPNet employs Multi-Frame Knowledge Distillation based on the point clouds of multiple adjacent frames to accurately predict the voxel-wise labels by condensing various possibilities of voxel relationships. VPNet has shown superior performance and achieved state-of-the-art results on the SemanticKITTI and SemanticPOSS datasets.