Poster
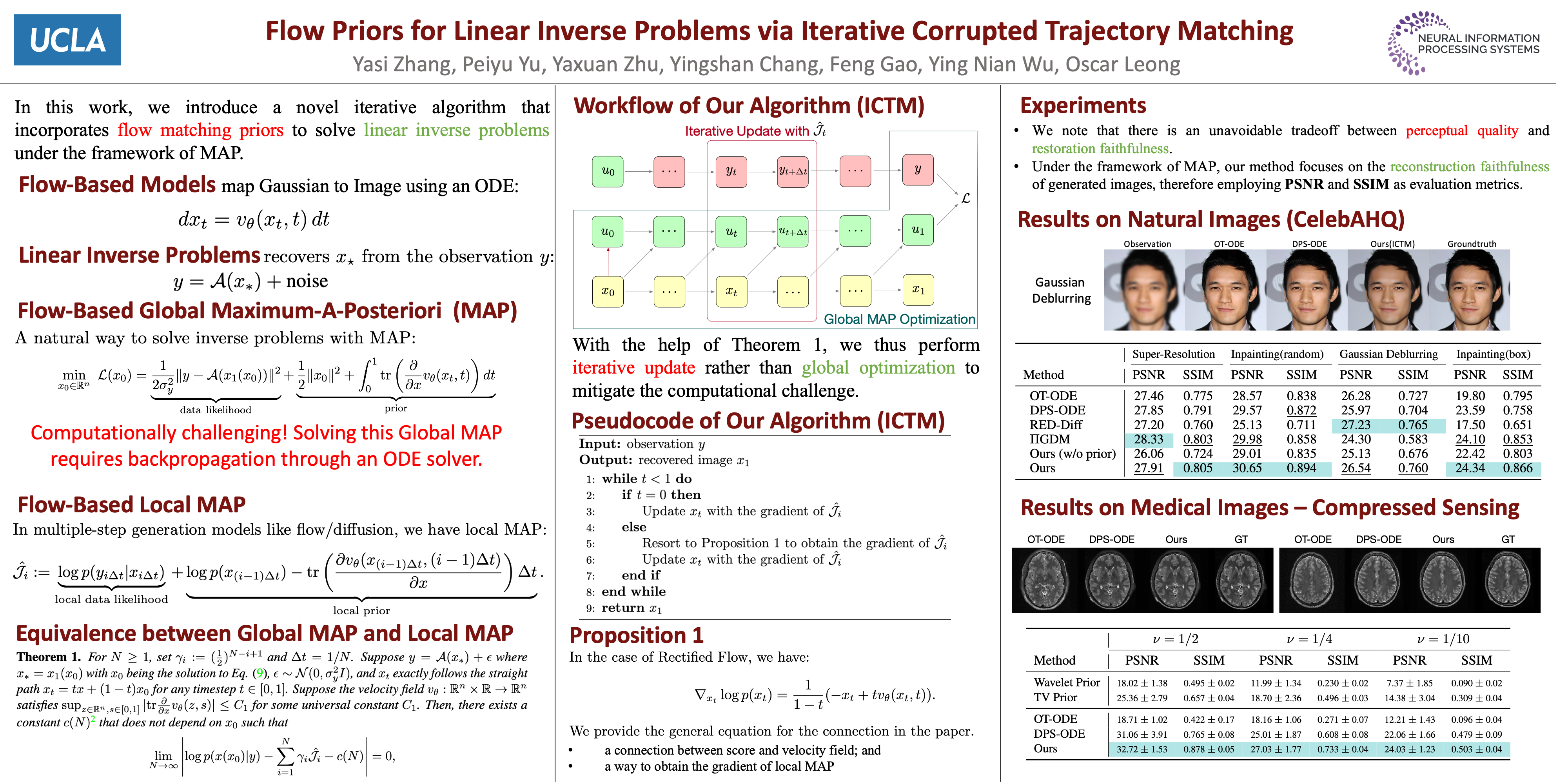
Flow Priors for Linear Inverse Problems via Iterative Corrupted Trajectory Matching
Yasi Zhang · Peiyu Yu · Yaxuan Zhu · Yingshan CHANG · Feng Gao · Ying Nian Wu · Oscar Leong
East Exhibit Hall A-C #2408
{kind=link}
Abstract:
Generative models based on flow matching have attracted significant attention for their simplicity and superior performance in high-resolution image synthesis. By leveraging the instantaneous change-of-variables formula, one can directly compute image likelihoods from a learned flow, making them enticing candidates as priors for downstream tasks such as inverse problems. In particular, a natural approach would be to incorporate such image probabilities in a maximum-a-posteriori (MAP) estimation problem. A major obstacle, however, lies in the slow computation of the log-likelihood, as it requires backpropagating through an ODE solver, which can be prohibitively slow for high-dimensional problems. In this work, we propose an iterative algorithm to approximate the MAP estimator efficiently to solve a variety of linear inverse problems. Our algorithm is mathematically justified by the observation that the MAP objective can be approximated by a sum of $N$ ``local MAP'' objectives, where $N$ is the number of function evaluations. By leveraging Tweedie's formula, we show that we can perform gradient steps to sequentially optimize these objectives. We validate our approach for various linear inverse problems, such as super-resolution, deblurring, inpainting, and compressed sensing, and demonstrate that we can outperform other methods based on flow matching. Code is available at \url{https://github.com/YasminZhang/ICTM}.
Chat is not available.