Poster
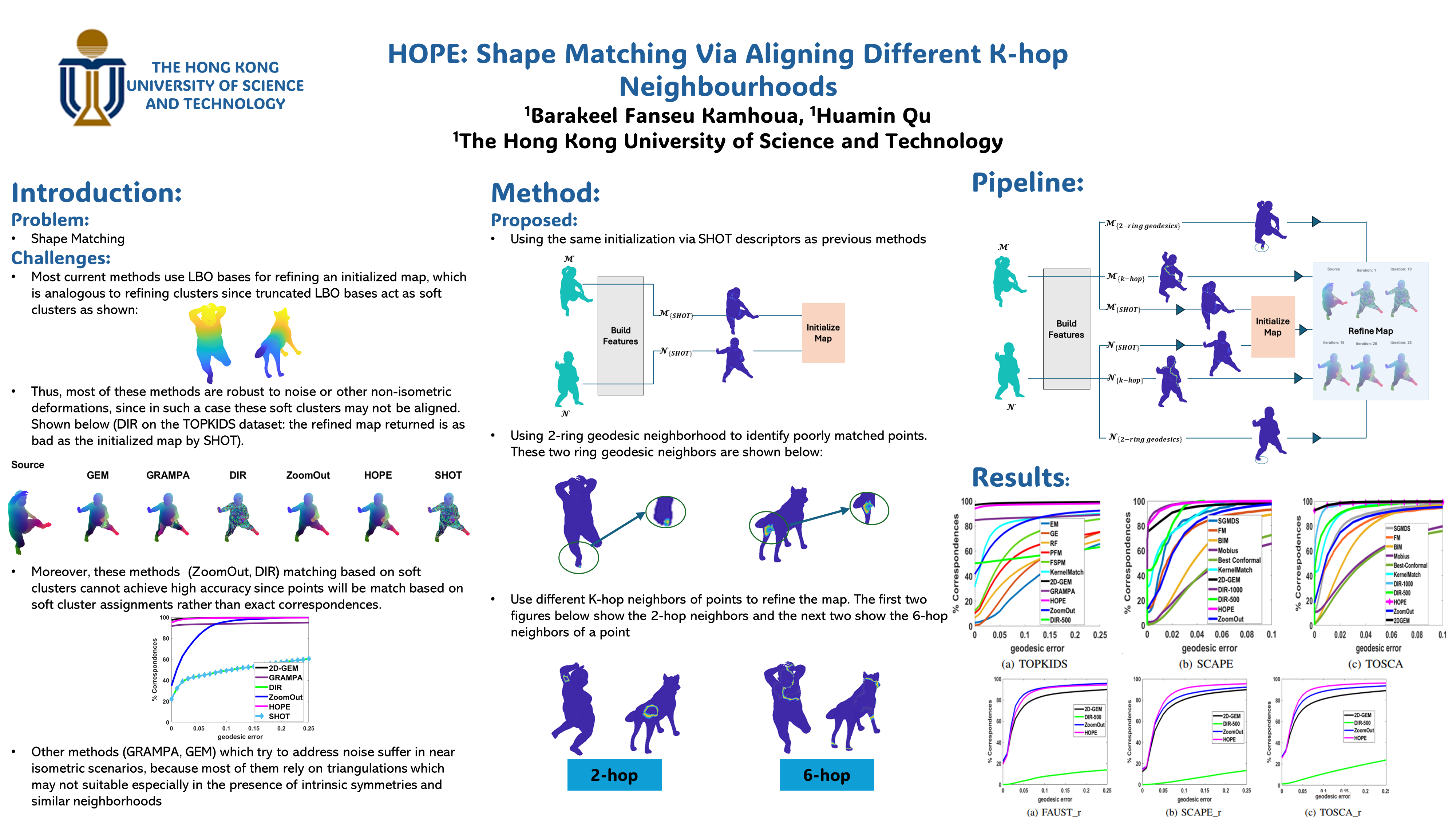
HOPE: Shape Matching Via Aligning Different K-hop Neighbourhoods
Barakeel Fanseu Kamhoua · Huamin Qu
East Exhibit Hall A-C #1103
{kind=link}
Accurate and smooth shape matching is very hard to achieve. This is because for accuracy, one needs unique descriptors (signatures) on shapes that distinguish different vertices on a mesh accurately while at the same time being invariant to deformations. However, most existing unique shape descriptors are generally not smooth on the shape and are not noise-robust thus leading to non-smooth matches. On the other hand, for smoothness, one needs descriptors that are smooth and continuous on the shape. However, existing smooth descriptors are generally not unique and as such lose accuracy as they match neighborhoods (for smoothness) rather than exact vertices (for accuracy). In this work, we propose to use different k-hop neighborhoods of vertices as pairwise descriptors for shape matching. We use these descriptors in conjunction with local map distortion (LMD) to refine an initialized map for shape matching. We validate the effectiveness of our pipeline on benchmark datasets such as SCAPE, TOSCA, TOPKIDS, and others.