Spotlight Poster
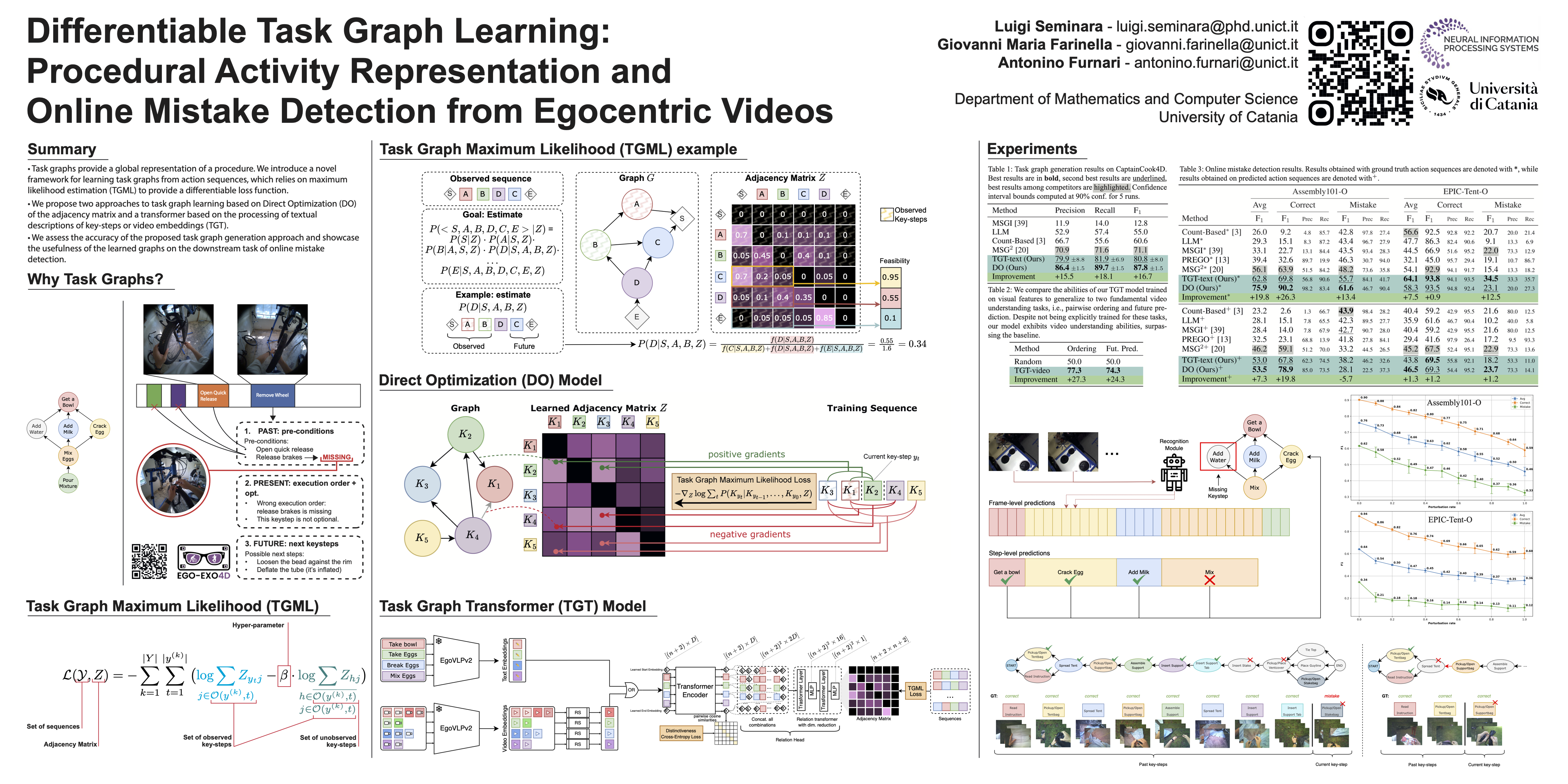
Differentiable Task Graph Learning: Procedural Activity Representation and Online Mistake Detection from Egocentric Videos
Luigi Seminara · Giovanni Maria Farinella · Antonino Furnari
East Exhibit Hall A-C #1607
{kind=link}
Procedural activities are sequences of key-steps aimed at achieving specific goals. They are crucial to build intelligent agents able to assist users effectively. In this context, task graphs have emerged as a human-understandable representation of procedural activities, encoding a partial ordering over the key-steps. While previous works generally relied on hand-crafted procedures to extract task graphs from videos, in this paper, we propose an approach based on direct maximum likelihood optimization of edges' weights, which allows gradient-based learning of task graphs and can be naturally plugged into neural network architectures. Experiments on the CaptainCook4D dataset demonstrate the ability of our approach to predict accurate task graphs from the observation of action sequences, with an improvement of +16.7% over previous approaches. Owing to the differentiability of the proposed framework, we also introduce a feature-based approach, aiming to predict task graphs from key-step textual or video embeddings, for which we observe emerging video understanding abilities. Task graphs learned with our approach are also shown to significantly enhance online mistake detection in procedural egocentric videos, achieving notable gains of +19.8% and +7.5% on the Assembly101-O and EPIC-Tent-O datasets. Code for replicating the experiments is available at https://github.com/fpv-iplab/Differentiable-Task-Graph-Learning.