Poster
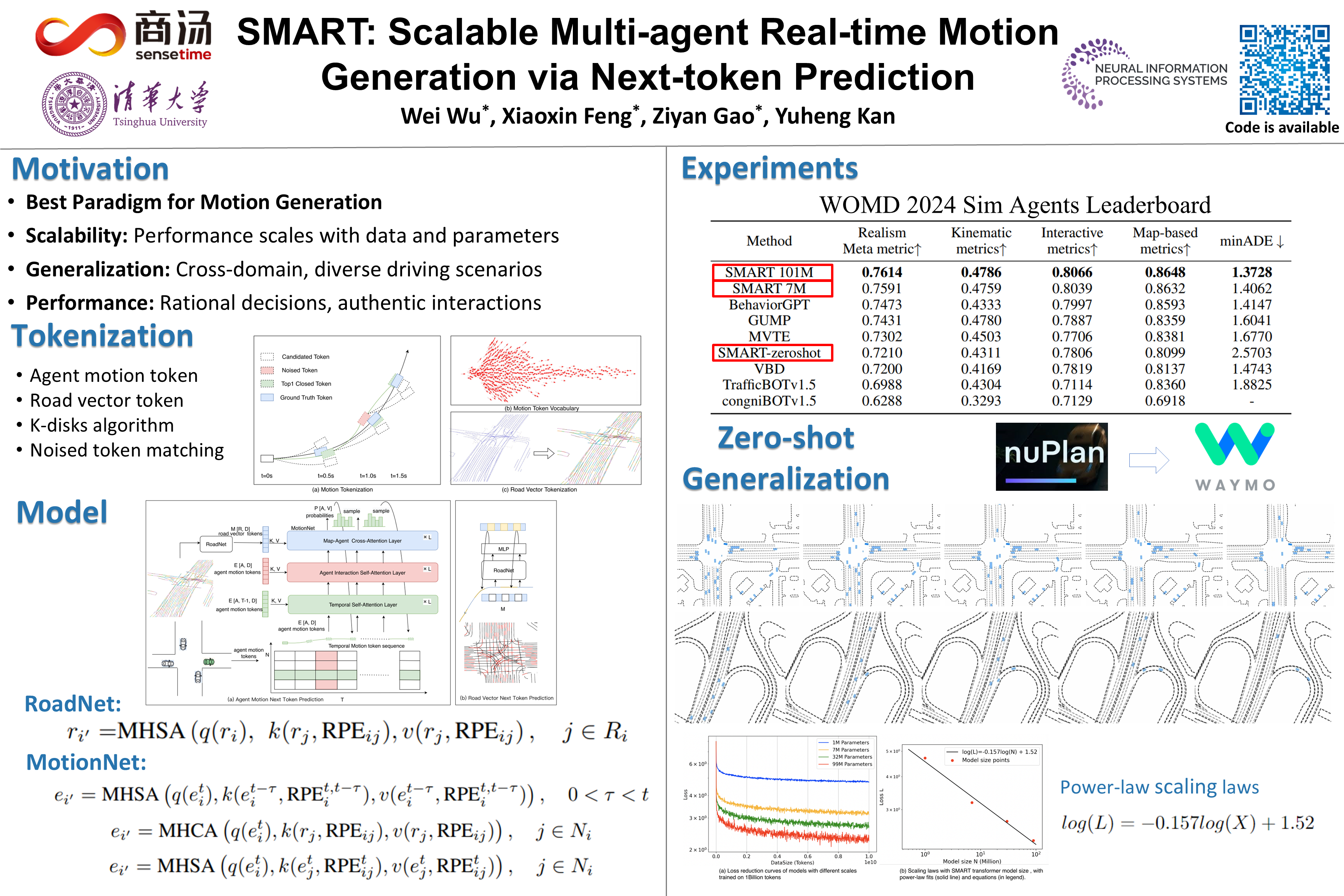
SMART: Scalable Multi-agent Real-time Motion Generation via Next-token Prediction
Wei Wu · Xiaoxin Feng · Ziyan Gao · Yuheng KAN
East Exhibit Hall A-C #2511
{kind=link}
Data-driven autonomous driving motion generation tasks are frequently impacted by the limitations of dataset size and the domain gap between datasets, which precludes their extensive application in real-world scenarios. To address this issue, we introduce SMART, a novel autonomous driving motion generation paradigm that models vectorized map and agent trajectory data into discrete sequence tokens. These tokens are then processed through a decoder-only transformer architecture to train for the next token prediction task across spatial-temporal series. This GPT-style method allows the model to learn the motion distribution in real driving scenarios. SMART achieves state-of-the-art performance across most of the metrics on the generative Sim Agents challenge, ranking 1st on the leaderboards of Waymo Open Motion Dataset (WOMD), demonstrating remarkable inference speed. Moreover, SMART represents the generative model in the autonomous driving motion domain, exhibiting zero-shot generalization capabilities: Using only the NuPlan dataset for training and WOMD for validation, SMART achieved a competitive score of 0.72 on the Sim Agents challenge. Lastly, we have collected over 1 billion motion tokens from multiple datasets, validating the model's scalability. These results suggest that SMART has initially emulated two important properties: scalability and zero-shot generalization, and preliminarily meets the needs of large-scale real-time simulation applications. We have released all the code to promote the exploration of models for motion generation in the autonomous driving field. The source code is available at https://github.com/rainmaker22/SMART.