Poster
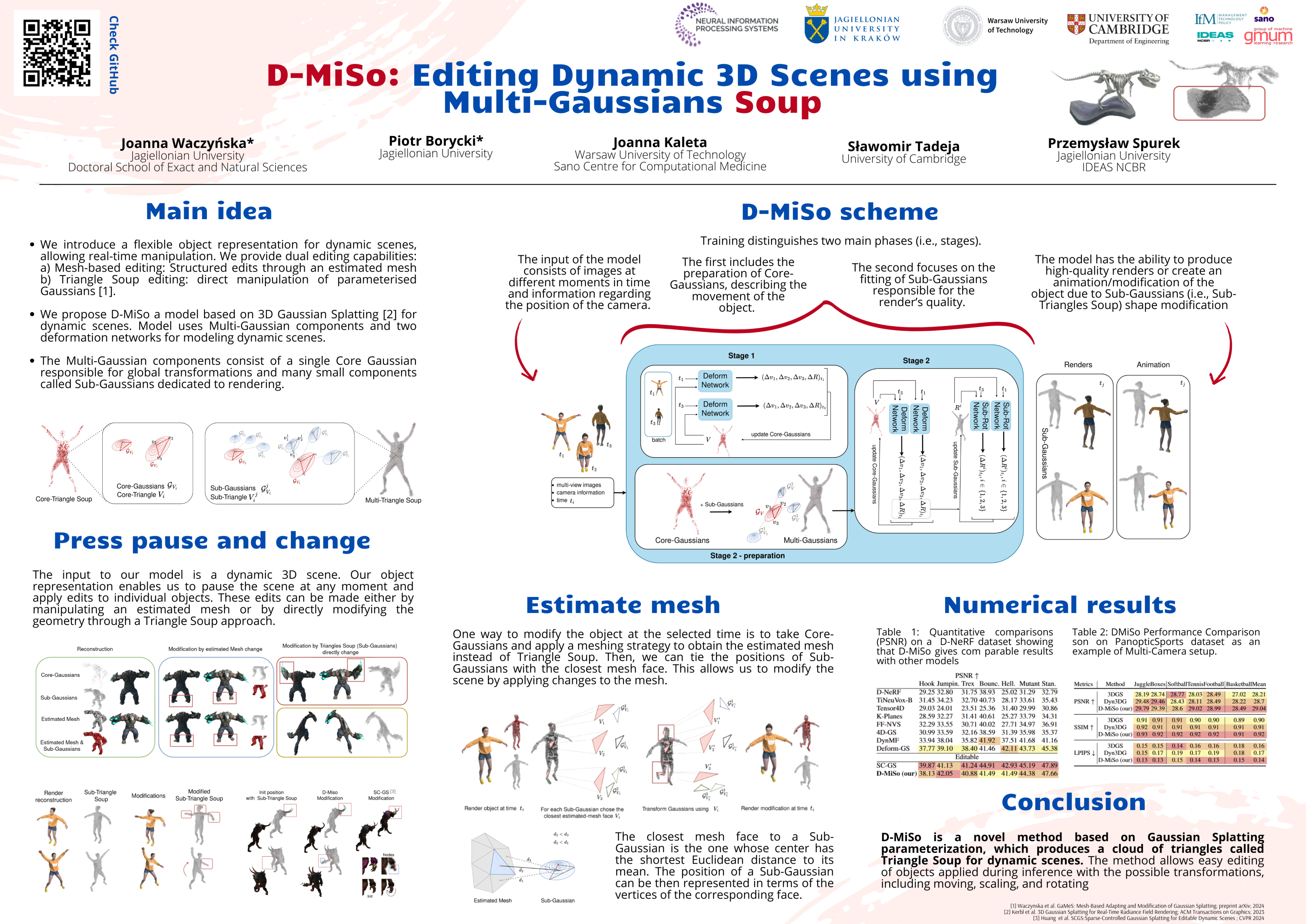
D-MiSo: Editing Dynamic 3D Scenes using Multi-Gaussians Soup
Joanna Waczynska · Piotr Borycki · Joanna Kaleta · Slawomir Tadeja · Przemysław Spurek
East Exhibit Hall A-C #1109
{kind=link}
Over the past years, we have observed an abundance of approaches for modeling dynamic 3D scenes using Gaussian Splatting (GS). These solutions use GS to represent the scene's structure and the neural network to model dynamics. Such approaches allow fast rendering and extracting each element of such a dynamic scene. However, modifying such objects over time is challenging. SC-GS (Sparse Controlled Gaussian Splatting) enhanced with Deformed Control Points partially solves this issue. However, this approach necessitates selecting elements that need to be kept fixed, as well as centroids that should be adjusted throughout editing. Moreover, this task poses additional difficulties regarding the re-productivity of such editing. To address this, we propose Dynamic Multi-Gaussian Soup (D-MiSo), which allows us to model the mesh-inspired representation of dynamic GS. Additionally, we propose a strategy of linking parameterized Gaussian splats, forming a Triangle Soup with the estimated mesh. Consequently, we can separately construct new trajectories for the 3D objects composing the scene. Thus, we can make the scene's dynamic editable over time or while maintaining partial dynamics.