Poster
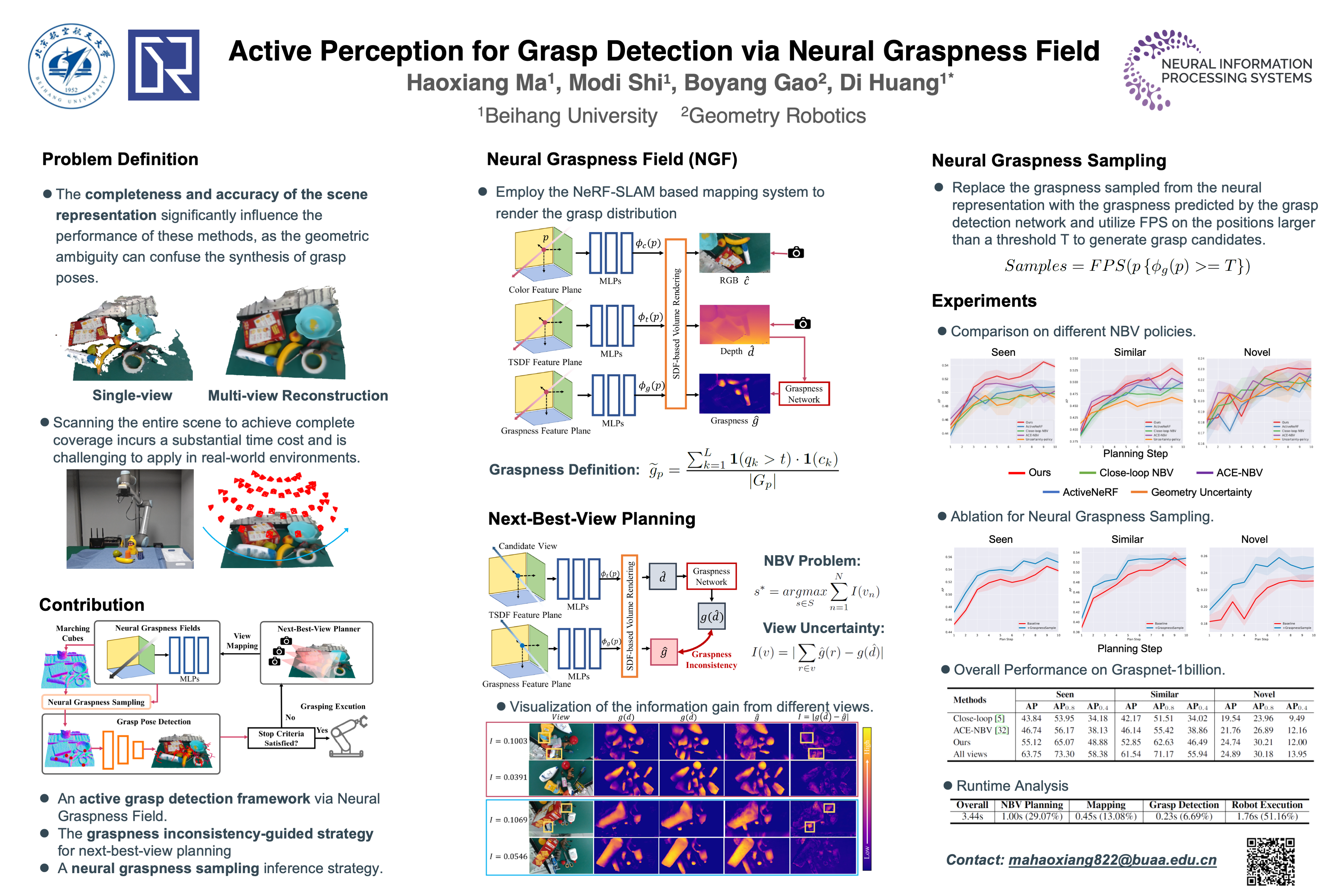
Active Perception for Grasp Detection via Neural Graspness Field
Haoxiang Ma · Modi Shi · Boyang Gao · Di Huang
East Exhibit Hall A-C #4110
{kind=link}
This paper tackles the challenge of active perception for robotic grasp detection in cluttered environments. Incomplete 3D geometry information can negatively affect the performance of learning-based grasp detection methods, and scanning the scene from multiple views introduces significant time costs. To achieve reliable grasping performance with efficient camera movement, we propose an active grasp detection framework based on the Neural Graspness Field (NGF), which models the scene incrementally and facilitates next-best-view planning. Constructed in real-time as the camera moves, the NGF effectively models the grasp distribution in 3D space by rendering graspness predictions from each view. For next-best-view planning, we aim to reduce the uncertainty of the NGF through a graspness inconsistency-guided policy, selecting views based on discrepancies between NGF outputs and a pre-trained graspness network. Additionally, we present a neural graspness sampling method that decodes graspness values from the NGF to improve grasp pose detection results. Extensive experiments on the GraspNet-1Billion benchmark demonstrate significant performance improvements compared to previous works. Real-world experiments show that our method achieves a superior trade-off between grasping performance and time costs.