Poster
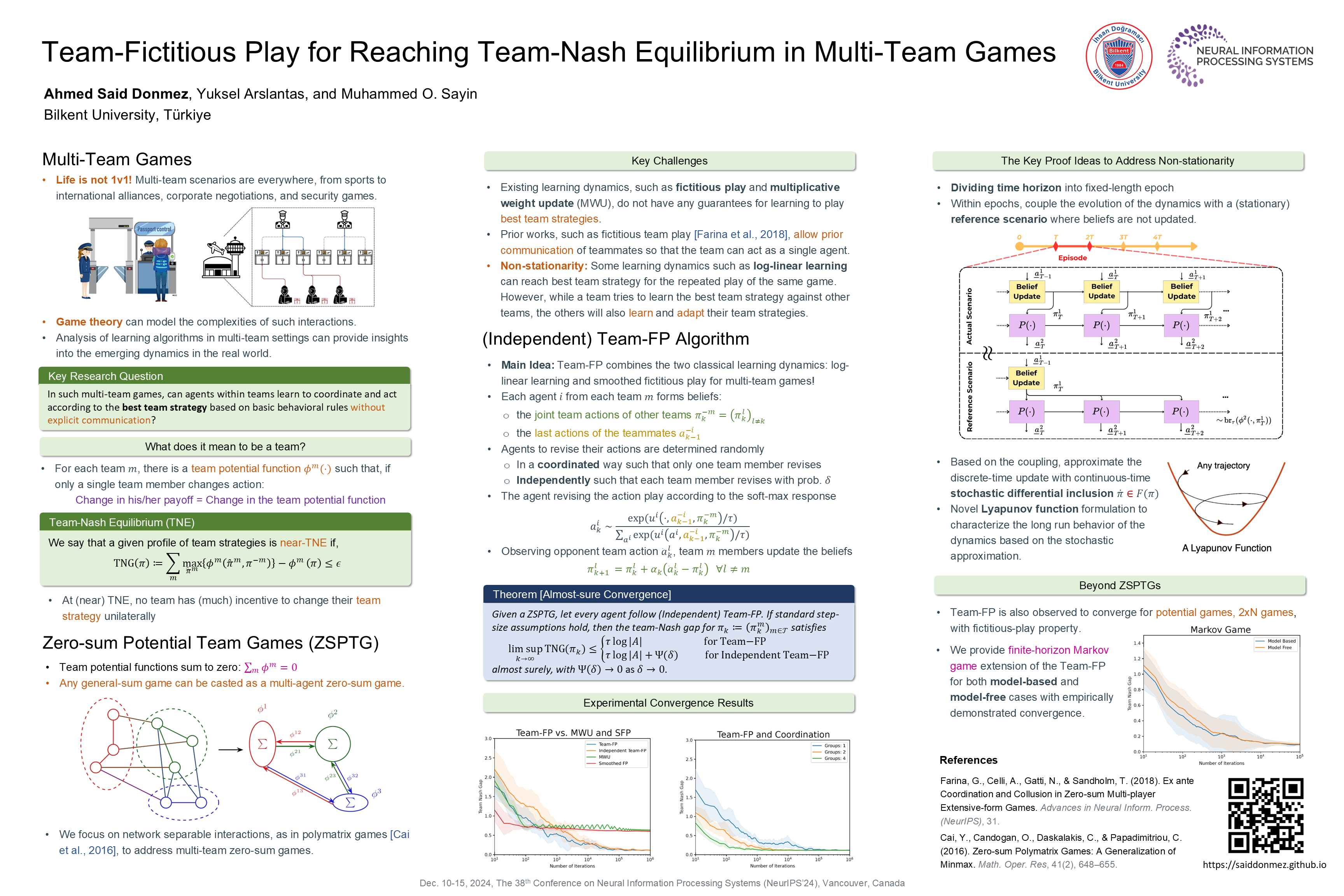
Team-Fictitious Play for Reaching Team-Nash Equilibrium in Multi-team Games
Ahmed Dönmez · Yüksel Arslantaş · Muhammed Sayin
West Ballroom A-D #6801
{kind=link}
Multi-team games, prevalent in robotics and resource management, involve team members striving for a joint best response against other teams. Team-Nash equilibrium (TNE) predicts the outcomes of such coordinated interactions. However, can teams of self-interested agents reach TNE? We introduce Team-Fictitious Play (Team-FP), a new variant of fictitious play where agents respond to the last actions of team members and the beliefs formed about other teams with some inertia in action updates. This design is essential in team coordination beyond the classical fictitious play dynamics. We focus on zero-sum potential team games (ZSPTGs) where teams can interact pairwise while the team members do not necessarily have identical payoffs. We show that Team-FP reaches near TNE in ZSPTGs with a quantifiable error bound. We extend Team-FP dynamics to multi-team Markov games for model-based and model-free cases. The convergence analysis tackles the challenge of non-stationarity induced by evolving opponent strategies based on the optimal coupling lemma and stochastic differential inclusion approximation methods. Our work strengthens the foundation for using TNE to predict the behavior of decentralized teams and offers a practical rule for team learning in multi-team environments. We provide extensive simulations of Team-FP dynamics and compare its performance with other widely studied dynamics such as smooth fictitious play and multiplicative weights update. We further explore how different parameters impact the speed of convergence.