Poster
Performative Control for Linear Dynamical Systems
Songfu Cai · Fei Han · Xuanyu Cao
West Ballroom A-D #5908
{kind=link}
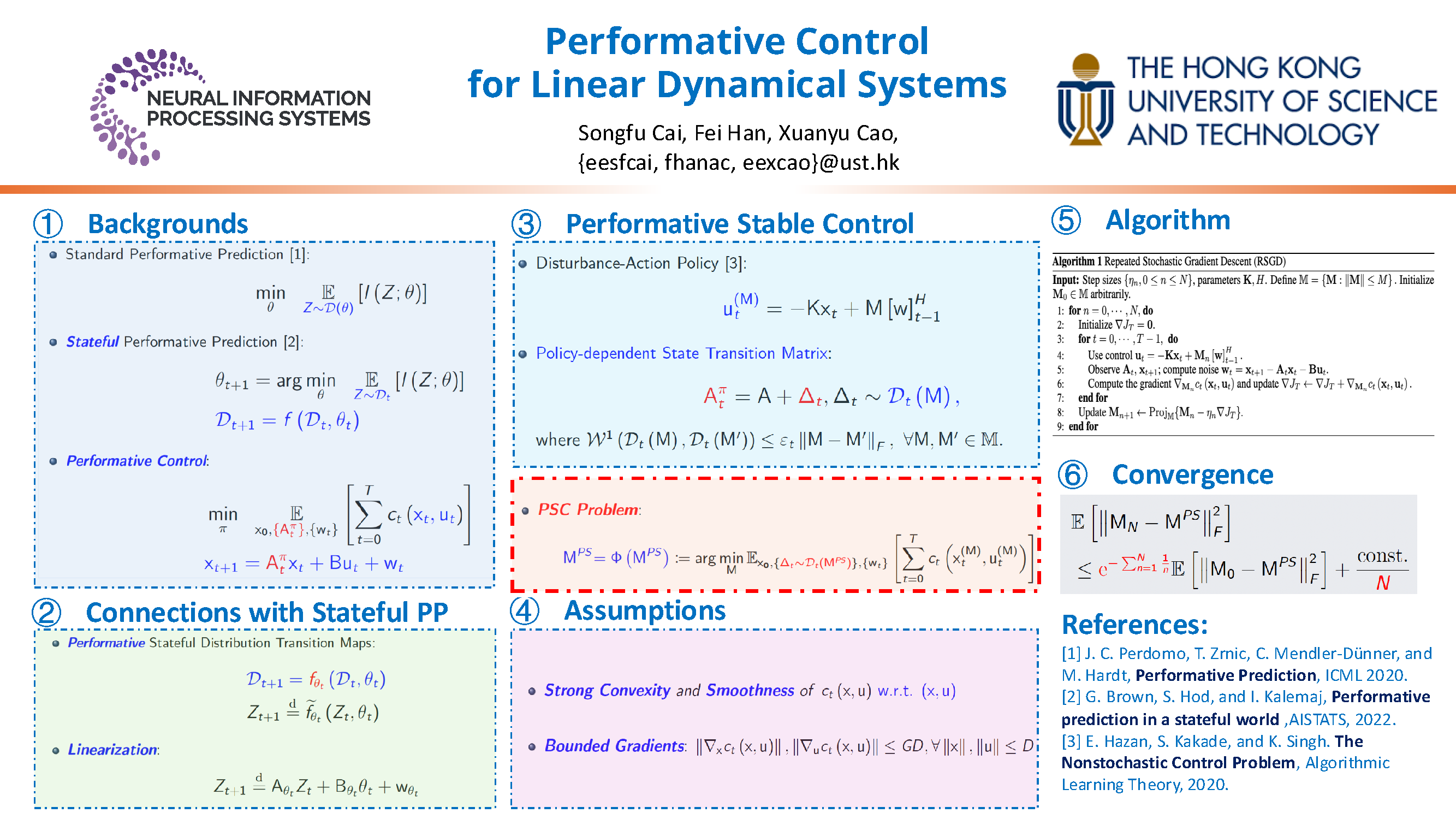
We introduce the framework of performative control, where the policy chosen by the controller affects the underlying dynamics of the control system. This results in a sequence of policy-dependent system state data with policy-dependent temporal correlations. Following the recent literature on performative prediction \cite{perdomo2020performative}, we introduce the concept of a performatively stable control (PSC) solution. We first propose a sufficient condition for the performative control problem to admit a unique PSC solution with a problem-specific structure of distributional sensitivity propagation and aggregation. We further analyze the impacts of system stability on the existence of the PSC solution. Specifically, for {almost surely strongly stable} policy-dependent dynamics, the PSC solution exists if the sum of the distributional sensitivities is small enough. However, for almost surely unstable policy-dependent dynamics, the existence of the PSC solution will necessitate a temporally backward decaying of the distributional sensitivities. We finally provide a repeated stochastic gradient descent scheme that converges to the PSC solution and analyze its non-asymptotic convergence rate. Numerical results validate our theoretical analysis.