Poster
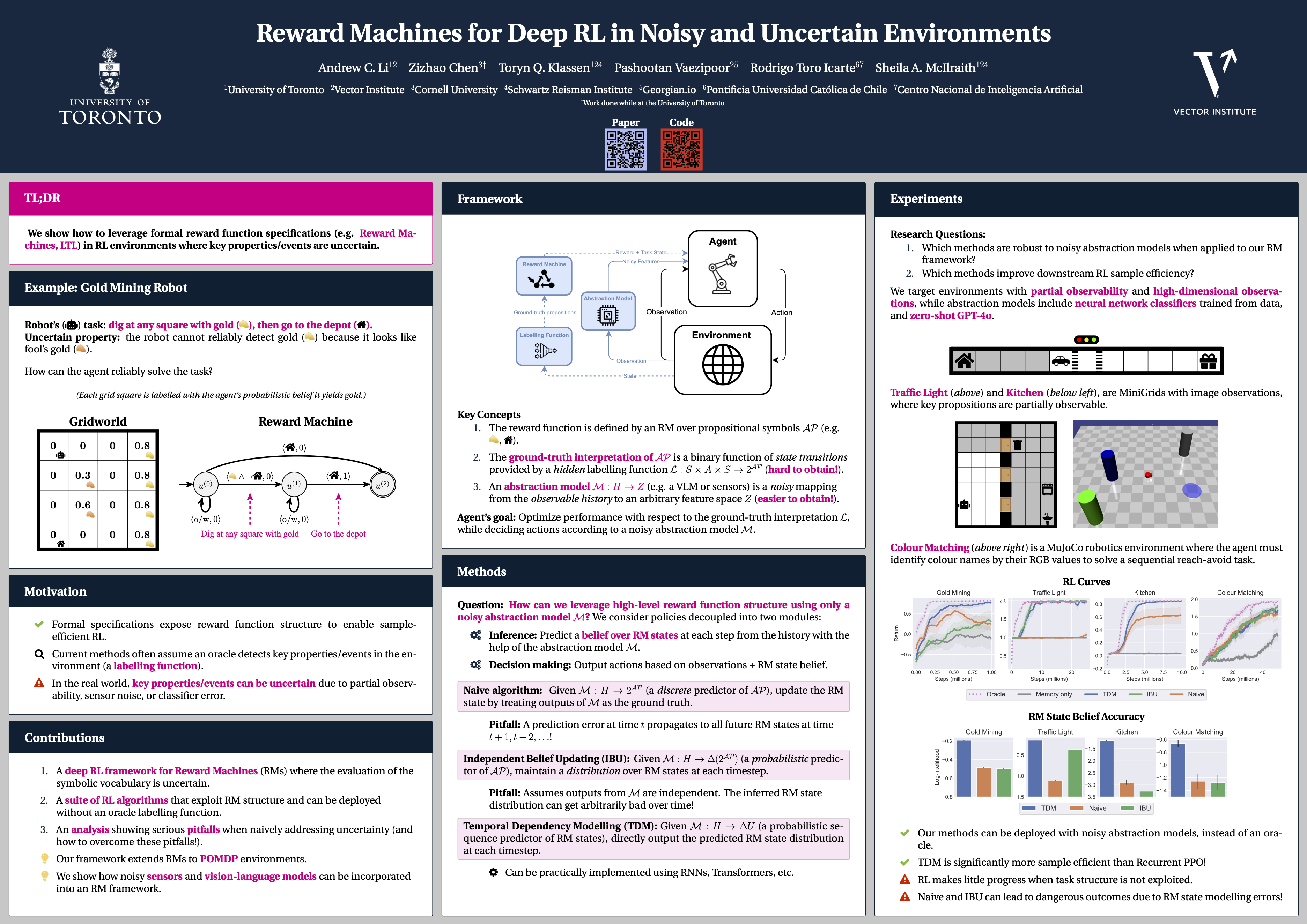
Reward Machines for Deep RL in Noisy and Uncertain Environments
Andrew Li · Zizhao Chen · Toryn Klassen · Pashootan Vaezipoor · Rodrigo Toro Icarte · Sheila McIlraith
West Ballroom A-D #6509
{kind=link}
Reward Machines provide an automaton-inspired structure for specifying instructions, safety constraints, and other temporally extended reward-worthy behaviour. By exposing the underlying structure of a reward function, they enable the decomposition of an RL task, leading to impressive gains in sample efficiency. Although Reward Machines and similar formal specifications have a rich history of application towards sequential decision-making problems, prior frameworks have traditionally ignored ambiguity and uncertainty when interpreting the domain-specific vocabulary forming the building blocks of the reward function. Such uncertainty critically arises in many real-world settings due to factors like partial observability or noisy sensors. In this work, we explore the use of Reward Machines for Deep RL in noisy and uncertain environments. We characterize this problem as a POMDP and propose a suite of RL algorithms that exploit task structure under uncertain interpretation of the domain-specific vocabulary. Through theory and experiments, we expose pitfalls in naive approaches to this problem while simultaneously demonstrating how task structure can be successfully leveraged under noisy interpretations of the vocabulary.