Poster
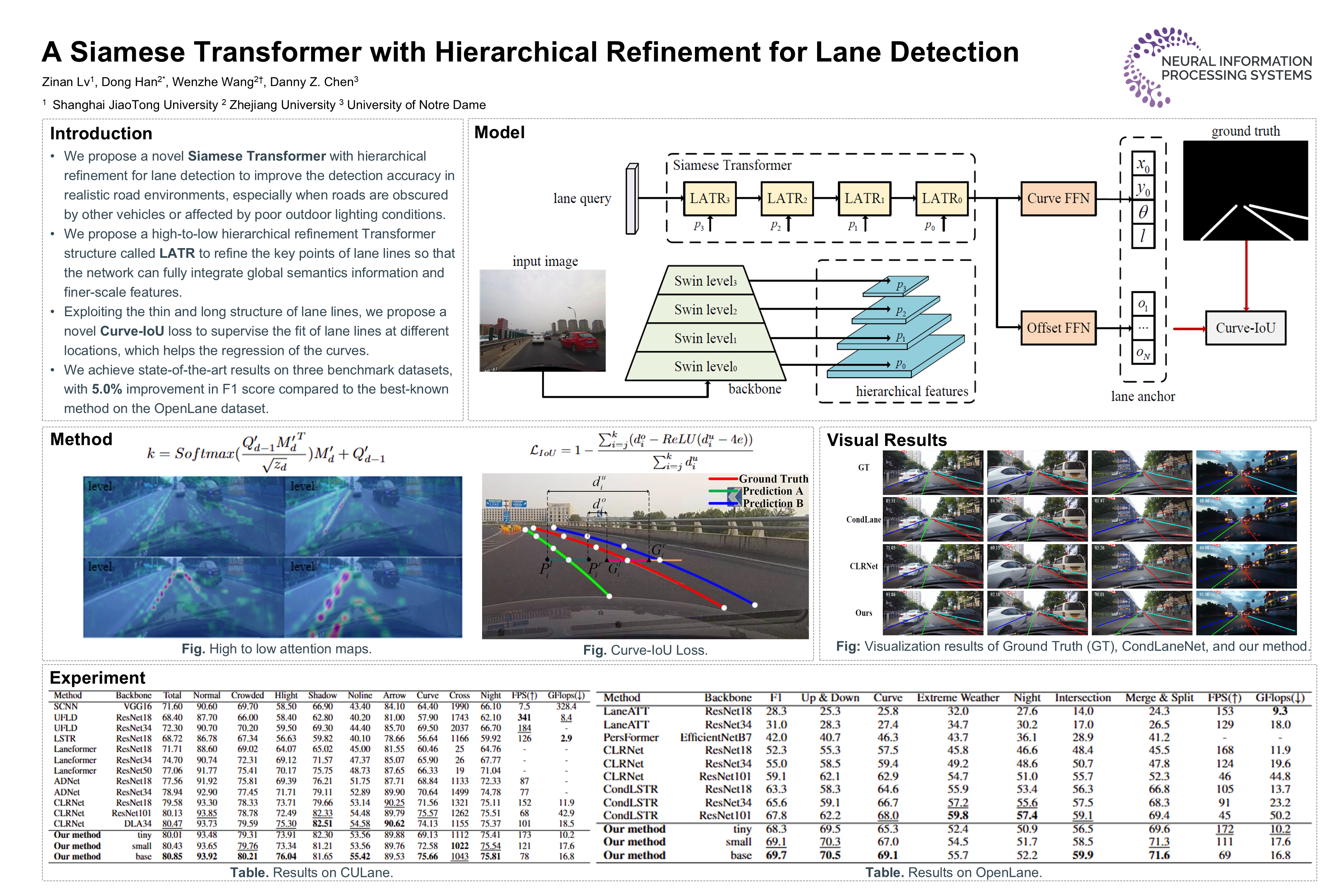
A Siamese Transformer with Hierarchical Refinement for Lane Detection
Zinan Lv · Dong Han · Wenzhe Wang · Danny Z Chen
East Exhibit Hall A-C #1301
{kind=link}
Lane detection is an important yet challenging task in autonomous driving systems. Existing lane detection methods mainly rely on finer-scale information to identify key points of lane lines. Since local information in realistic road environments is frequently obscured by other vehicles or affected by poor outdoor lighting conditions, these methods struggle with the regression of such key points. In this paper, we propose a novel Siamese Transformer with hierarchical refinement for lane detection to improve the detection accuracy in complex road environments. Specifically, we propose a high-to-low hierarchical refinement Transformer structure, called LAne TRansformer (LATR), to refine the key points of lane lines, which integrates global semantics information and finer-scale features. Moreover, exploiting the thin and long characteristics of lane lines, we propose a novel Curve-IoU loss to supervise the fit of lane lines. Extensive experiments on three benchmark datasets of lane detection demonstrate that our proposed new method achieves state-of-the-art results with high accuracy and efficiency. Specifically, our method achieves improved F1 scores on the OpenLane dataset, surpassing the current best-performing method by 5.0 points.