Poster
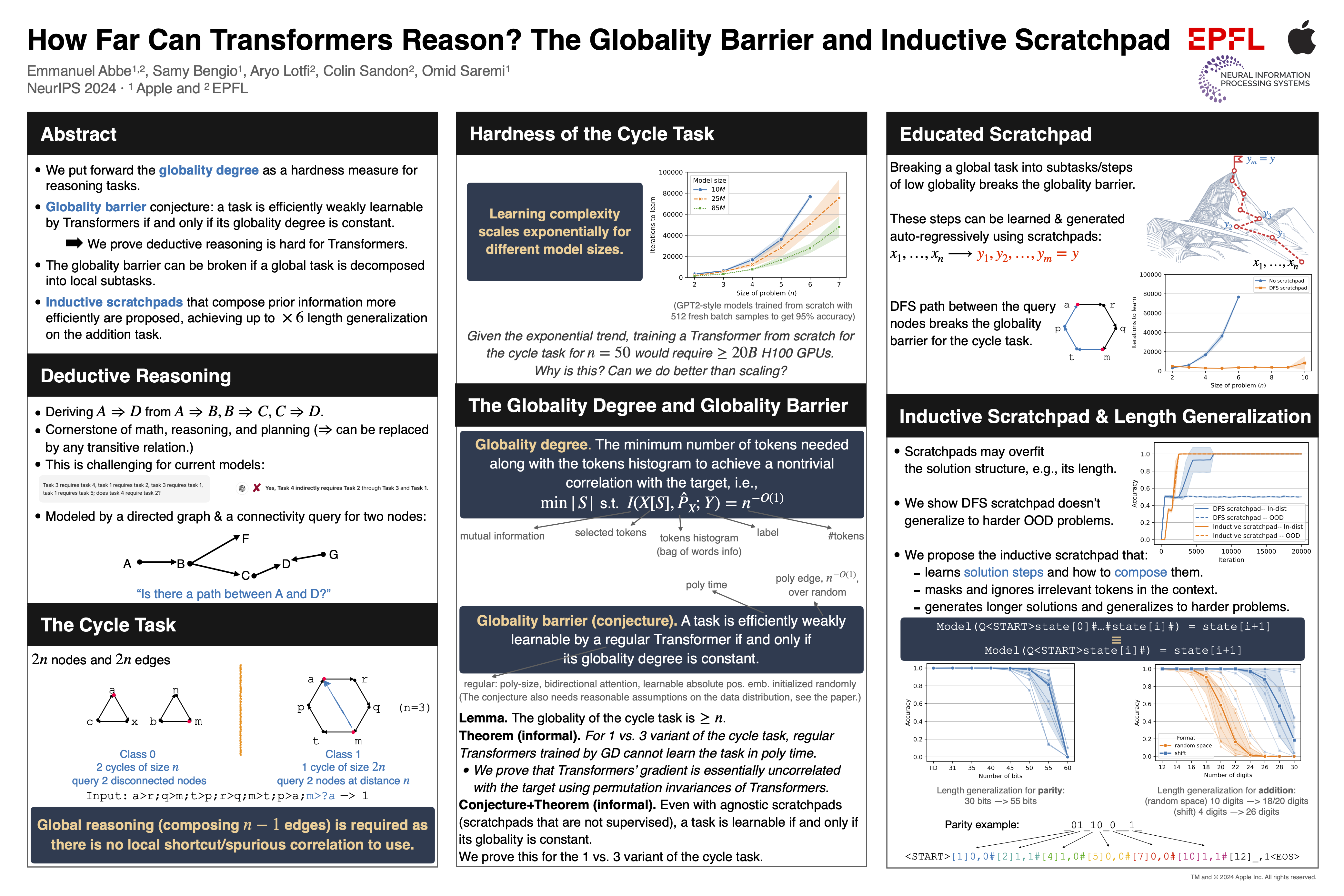
How Far Can Transformers Reason? The Globality Barrier and Inductive Scratchpad
Emmanuel Abbe · Samy Bengio · Aryo Lotfi · Colin Sandon · Omid Saremi
East Exhibit Hall A-C #3006
{kind=link}
Abstract:
Can Transformers predict new syllogisms by composing established ones? More generally, what type of targets can be learned by such models from scratch? Recent works show that Transformers can be Turing-complete in terms of expressivity, but this does not address the learnability objective. This paper puts forward the notion of 'globality degree' of a target distribution to capture when weak learning is efficiently achievable by regular Transformers. This measure shows a contrast with the expressivity results of Transformers captured by $TC^0/TC^1$ classes (further studied here), since the globality relates to correlations with the more limited $NC^0$ class. We show here experimentally and theoretically under additional assumptions that distributions with high globality cannot be learned efficiently. In particular, syllogisms cannot be composed on long chains. Further, we develop scratchpad techniques and show that: (i) agnostic scratchpads cannot break the globality barrier, (ii) educated scratchpads can break the globality with intermediate steps, although not all such scratchpads can generalize out-of-distribution (OOD), (iii) a notion of 'inductive scratchpad', that composes the prior information more efficiently, can both break the globality barrier and improve the OOD generalization. In particular, some of our inductive scratchpads can achieve length generalizations of up to $6\times$ for some arithmetic tasks depending on the input formatting.
Chat is not available.