Poster
Dual Critic Reinforcement Learning under Partial Observability
Jinqiu Li · Enmin Zhao · Tong Wei · Junliang Xing · SHIMING XIANG
West Ballroom A-D #6300
{kind=link}
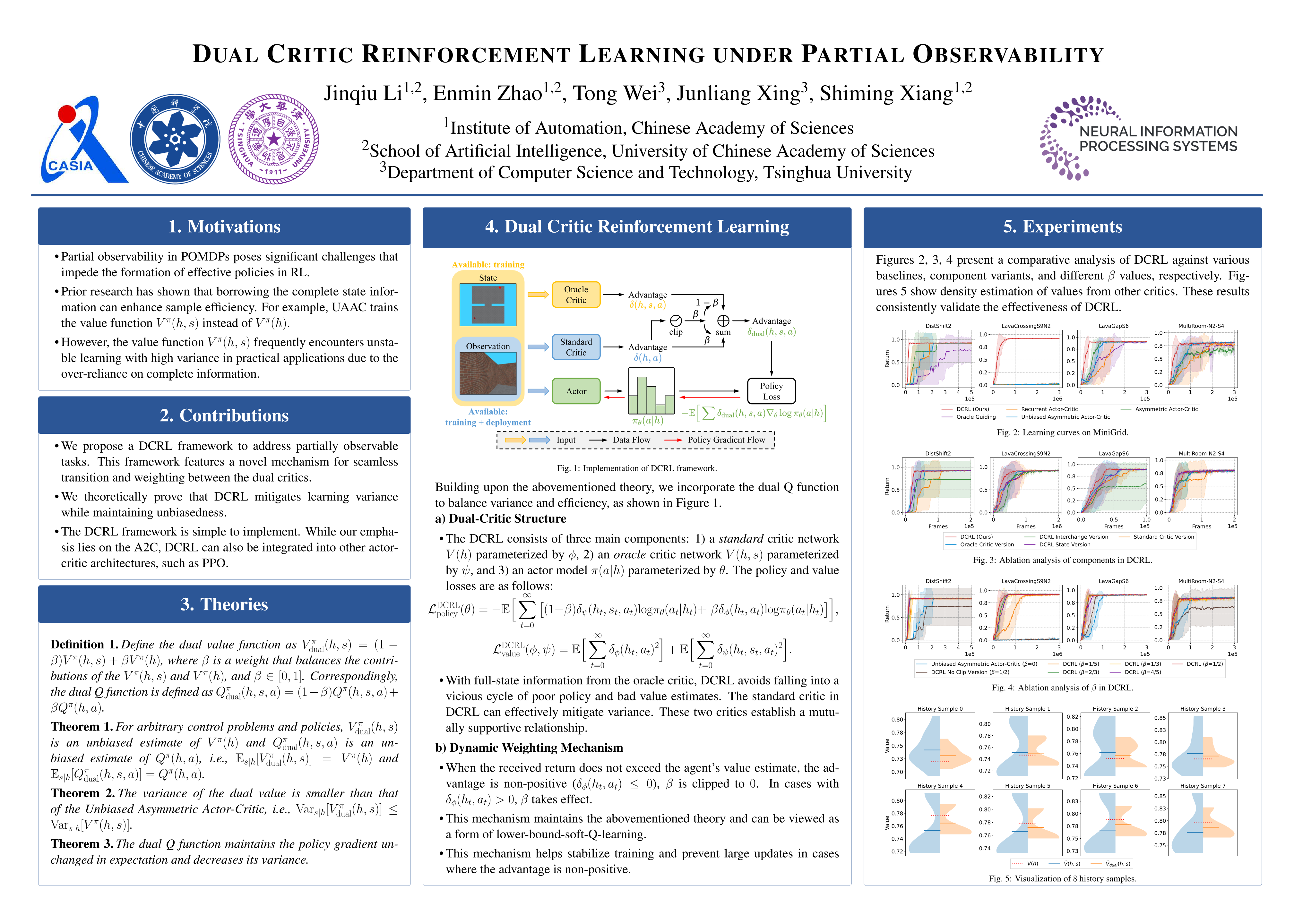
Partial observability in environments poses significant challenges that impede the formation of effective policies in reinforcement learning. Prior research has shown that borrowing the complete state information can enhance sample efficiency. This strategy, however, frequently encounters unstable learning with high variance in practical applications due to the over-reliance on complete information. This paper introduces DCRL, a Dual Critic Reinforcement Learning framework designed to adaptively harness full-state information during training to reduce variance for optimized online performance. In particular, DCRL incorporates two distinct critics: an oracle critic with access to complete state information and a standard critic functioning within the partially observable context. It innovates a synergistic strategy to meld the strengths of the oracle critic for efficiency improvement and the standard critic for variance reduction, featuring a novel mechanism for seamless transition and weighting between them. We theoretically prove that DCRL mitigates the learning variance while maintaining unbiasedness. Extensive experimental analyses across the Box2D and Box3D environments have verified DCRL's superior performance. The source code is available in the supplementary.