Poster
Online Control with Adversarial Disturbance for Continuous-time Linear Systems
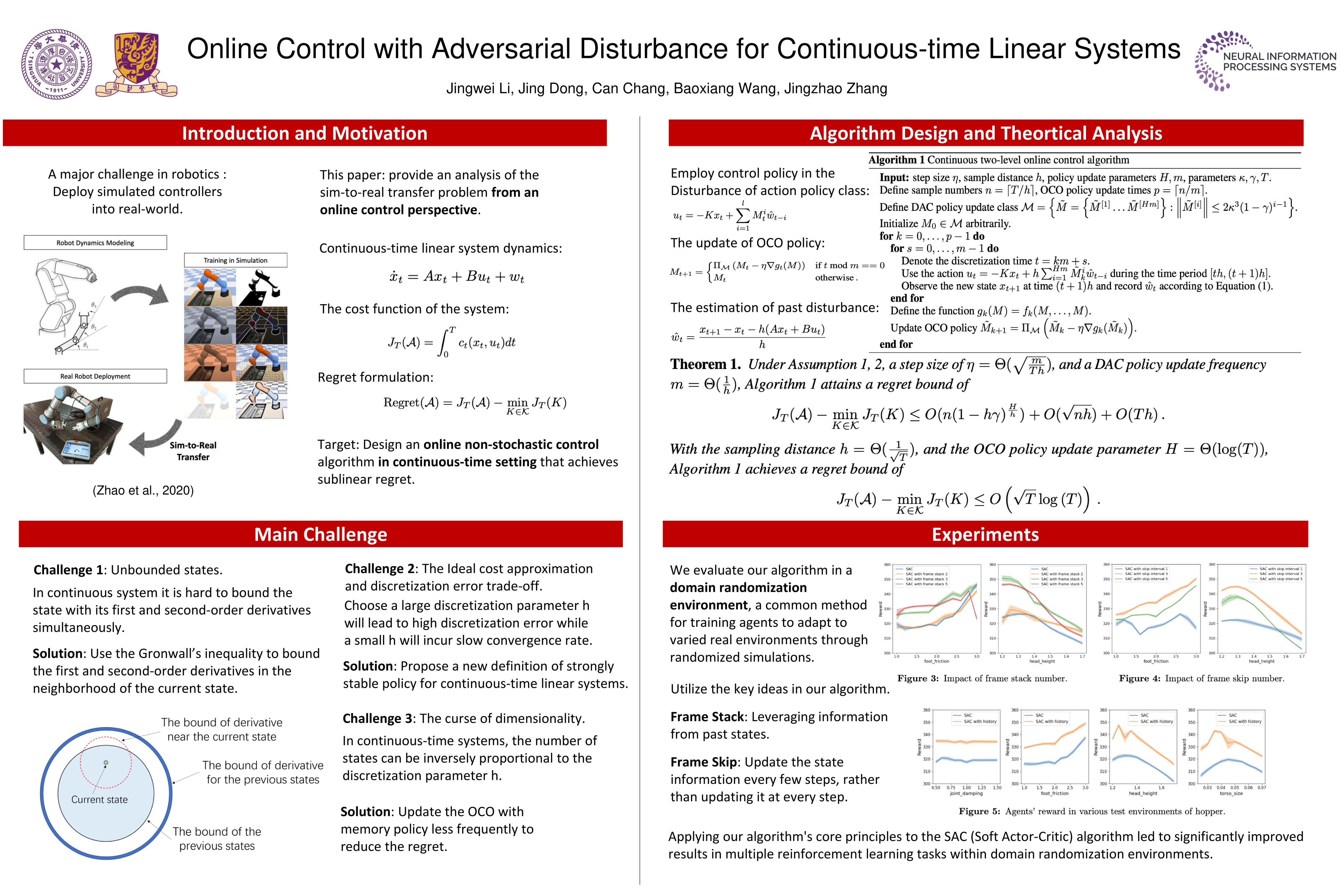
Jingwei Li · Jing Dong · Can Chang · Baoxiang Wang · Jingzhao Zhang
West Ballroom A-D #5807
{kind=link}
We study online control for continuous-time linear systems with finite sampling rates, where the objective is to design an online procedure that learns under non-stochastic noise and performs comparably to a fixed optimal linear controller. We present a novel two-level online algorithm, by integrating a higher-level learning strategy and a lower-level feedback control strategy. This method offers a practical and robust solution for online control, which achieves sublinear regret. Our work provides the first nonasymptotic results for controlling continuous-time linear systems with finite number of interactions with the system. Moreover, we examine how to train an agent in domain randomization environments from a non-stochastic control perspective. By applying our method to the SAC (Soft Actor-Critic) algorithm, we achieved improved results in multiple reinforcement learning tasks within domain randomization environments. Our work provides new insights into non-asymptotic analyses of controlling continuous-time systems. Furthermore, our work brings practical intuition into controller learning under non-stochastic environments.