Poster
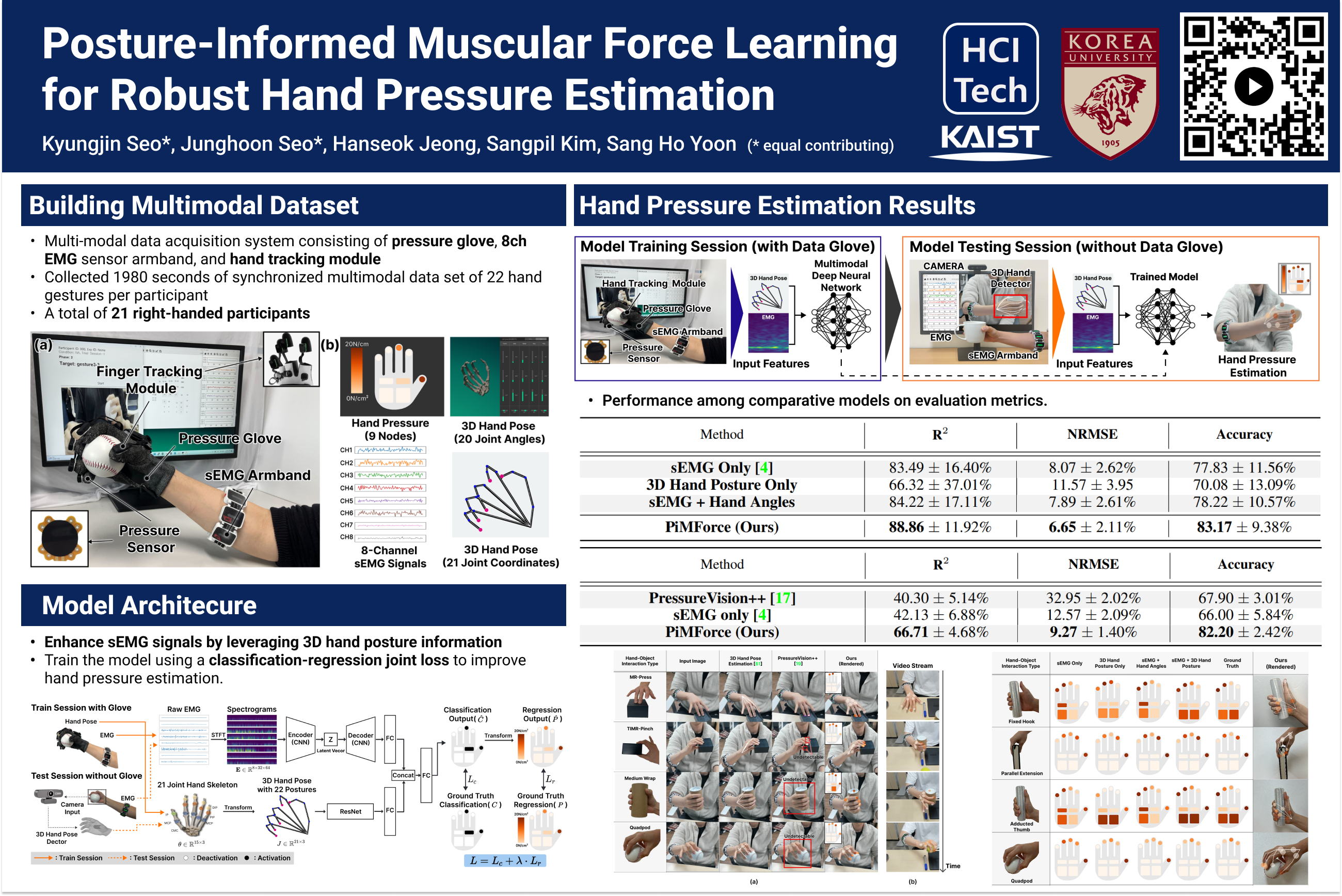
Posture-Informed Muscular Force Learning for Robust Hand Pressure Estimation
Kyungjin Seo · Junghoon Seo · Hanseok Jeong · Sangpil Kim · Sang Ho Yoon
East Exhibit Hall A-C #3202
{kind=link}
We present PiMForce, a novel framework that enhances hand pressure estimation by leveraging 3D hand posture information to augment forearm surface electromyography (sEMG) signals. Our approach utilizes detailed spatial information from 3D hand poses in conjunction with dynamic muscle activity from sEMG to enable accurate and robust whole-hand pressure measurements under diverse hand-object interactions. We also developed a multimodal data collection system that combines a pressure glove, an sEMG armband, and a markerless finger-tracking module. We created a comprehensive dataset from 21 participants, capturing synchronized data of hand posture, sEMG signals, and exerted hand pressure across various hand postures and hand-object interaction scenarios using our collection system. Our framework enables precise hand pressure estimation in complex and natural interaction scenarios. Our approach substantially mitigates the limitations of traditional sEMG-based or vision-based methods by integrating 3D hand posture information with sEMG signals.Video demos, data, and code are available online.