Poster
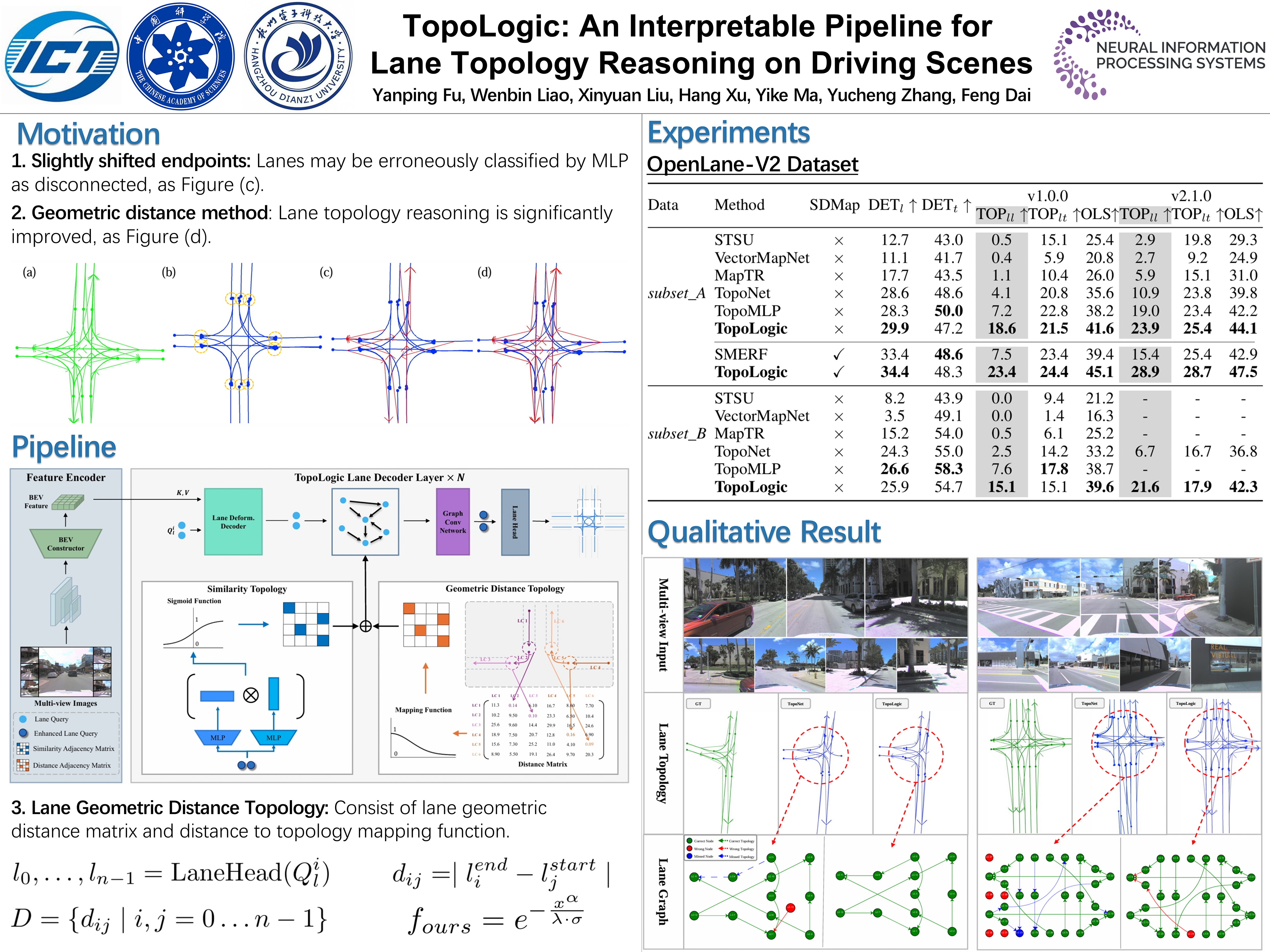
TopoLogic: An Interpretable Pipeline for Lane Topology Reasoning on Driving Scenes
Yanping Fu · Wenbin Liao · Xinyuan Liu · Hang Xu · Yike Ma · Yucheng Zhang · Feng Dai
East Exhibit Hall A-C #1305
{kind=link}
Abstract:
As an emerging task that integrates perception and reasoning, topology reasoning in autonomous driving scenes has recently garnered widespread attention. However, existing work often emphasizes "perception over reasoning": they typically boost reasoning performance by enhancing the perception of lanes and directly adopt vanilla MLPs to learn lane topology from lane query. This paradigm overlooks the geometric features intrinsic to the lanes themselves and are prone to being influenced by inherent endpoint shifts in lane detection. To tackle this issue, we propose an interpretable method for lane topology reasoning based on lane geometric distance and lane query similarity, named TopoLogic. This method mitigates the impact of endpoint shifts in geometric space, and introduces explicit similarity calculation in semantic space as a complement. By integrating results from both spaces, our methods provides more comprehensive information for lane topology. Ultimately, our approach significantly outperforms the existing state-of-the-art methods on the mainstream benchmark OpenLane-V2 (23.9 v.s. 10.9 in TOP$_{ll}$ and 44.1 v.s. 39.8 in OLS on subsetA). Additionally, our proposed geometric distance topology reasoning method can be incorporated into well-trained models without re-training, significantly enhancing the performance of lane topology reasoning. The code is released at https://github.com/Franpin/TopoLogic.
Chat is not available.