Poster
AutoManual: Constructing Instruction Manuals by LLM Agents via Interactive Environmental Learning
Minghao Chen · Yihang Li · Yanting Yang · Shiyu Yu · Binbin Lin · Xiaofei He
East Exhibit Hall A-C #1905
{kind=link}
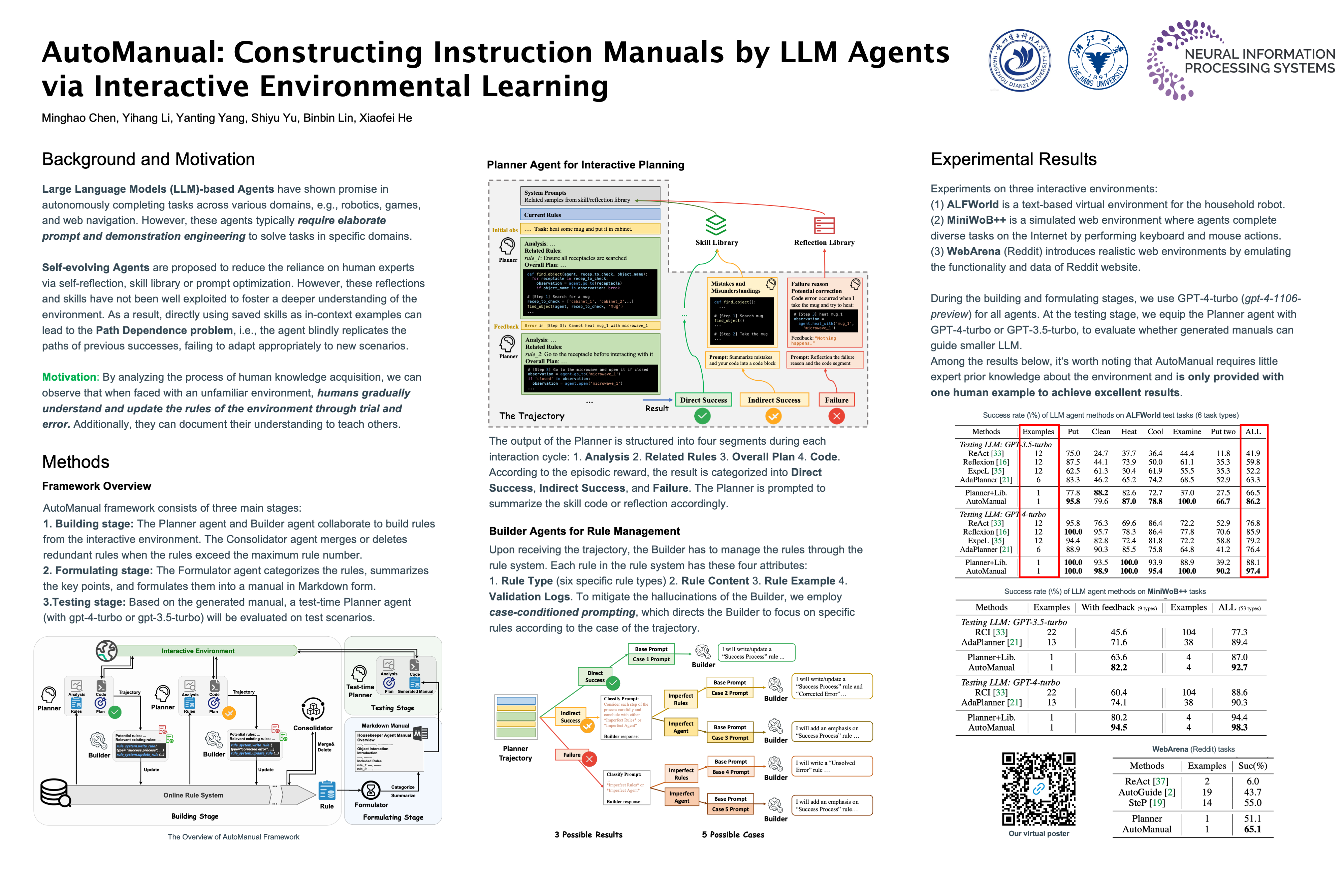
Large Language Models (LLM) based agents have shown promise in autonomously completing tasks across various domains, e.g., robotics, games, and web navigation. However, these agents typically require elaborate design and expert prompts to solve tasks in specific domains, which limits their adaptability. We introduce AutoManual, a framework enabling LLM agents to autonomously build their understanding through interaction and adapt to new environments. AutoManual categorizes environmental knowledge into diverse rules and optimizes them in an online fashion by two agents: 1) The Planner codes actionable plans based on current rules for interacting with the environment. 2) The Builder updates the rules through a well-structured rule system that facilitates online rule management and essential detail retention. To mitigate hallucinations in managing rules, we introduce a case-conditioned prompting strategy for the Builder. Finally, the Formulator agent compiles these rules into a comprehensive manual. The self-generated manual can not only improve the adaptability but also guide the planning of smaller LLMs while being human-readable. Given only one simple demonstration, AutoManual significantly improves task success rates, achieving 97.4\% with GPT-4-turbo and 86.2\% with GPT-3.5-turbo on ALFWorld benchmark tasks. The code is available at https://github.com/minghchen/automanual.