Poster
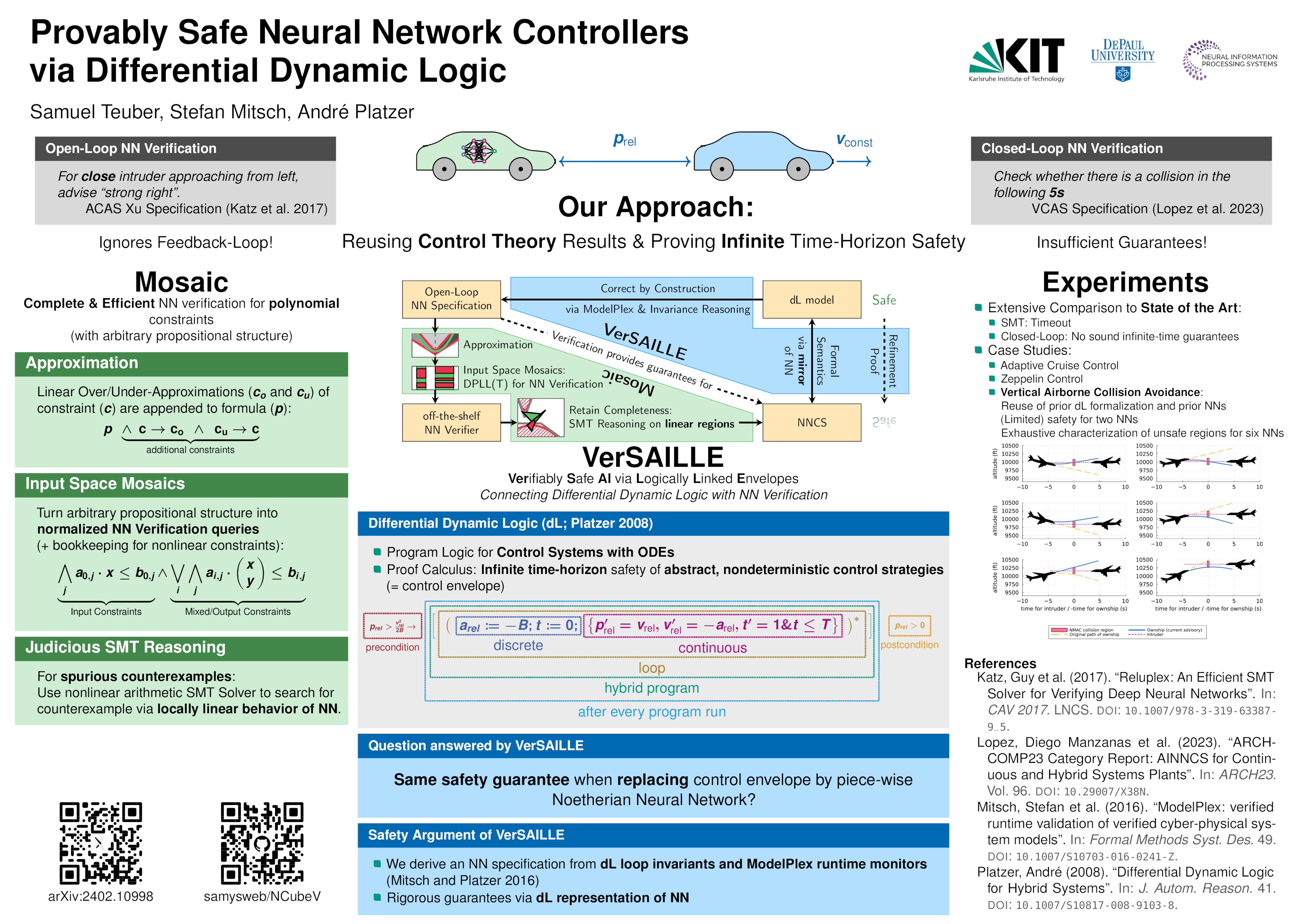
Provably Safe Neural Network Controllers via Differential Dynamic Logic
Samuel Teuber · Stefan Mitsch · André Platzer
East Exhibit Hall A-C #4201
{kind=link}
While neural networks (NNs) have a large potential as autonomous controllers for Cyber-Physical Systems, verifying the safety of neural network based control systems (NNCSs) poses significant challenges for the practical use of NNs— especially when safety is needed for unbounded time horizons. One reason for this is the intractability of analyzing NNs, ODEs and hybrid systems. To this end, we introduce VerSAILLE (Verifiably Safe AI via Logically Linked Envelopes): The first general approach that allows reusing control theory literature for NNCS verification. By joining forces, we can exploit the efficiency of NN verification tools while retaining the rigor of differential dynamic logic (dL). Based on a provably safe control envelope in dL, we derive a specification for the NN which is proven with NN verification tools. We show that a proof of the NN’s adherence to the specification is then mirrored by a dL proof on the infinite-time safety of the NNCS.The NN verification properties resulting from hybrid systems typically contain nonlinear arithmetic over formulas with arbitrary logical structure while efficient NN verification tools merely support linear constraints. To overcome this divide, we present Mosaic: An efficient, sound and complete verification approach for polynomial real arithmetic properties on piece-wise linear NNs. Mosaic partitions complex NN verification queries into simple queries and lifts off-the-shelf linear constraint tools to the nonlinear setting in a completeness-preserving manner by combining approximation with exact reasoning for counterexample regions. In our evaluation we demonstrate the versatility of VerSAILLE and Mosaic: We prove infinite-time safety on the classical Vertical Airborne Collision Avoidance NNCS verification benchmark for some scenarios while (exhaustively) enumerating counterexample regions in unsafe scenarios. We also show that our approach significantly outperforms the State-of-the-Art tools in closed-loop NNV