Poster
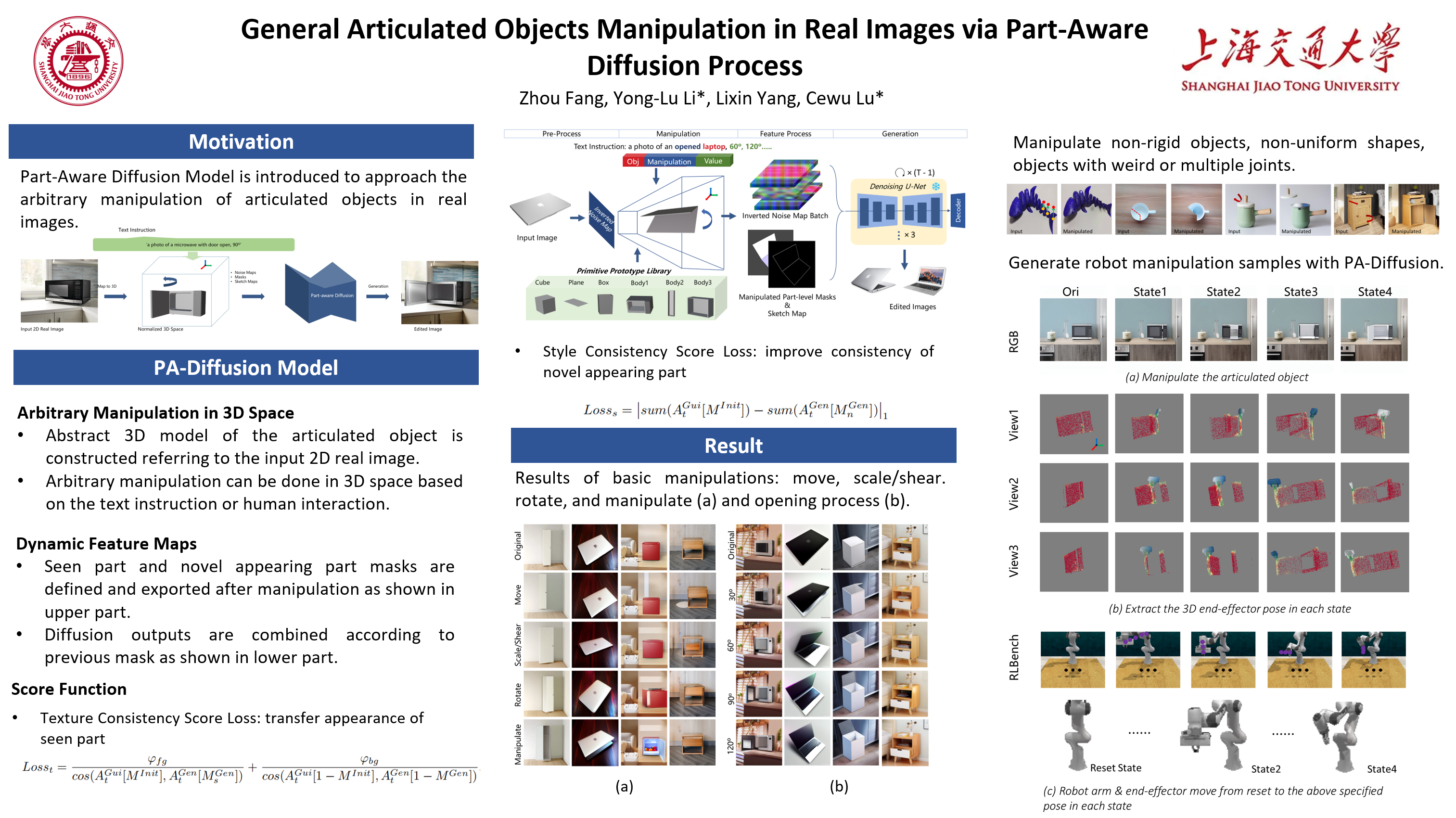
General Articulated Objects Manipulation in Real Images via Part-Aware Diffusion Process
ZHOU FANG · Yong-Lu Li · Lixin Yang · Cewu Lu
{kind=link}
Articulated object manipulation in real images is a fundamental step in computer and robotic vision tasks. Recently, several image editing methods based on diffusion models have been proposed to manipulate articulated objects according to text prompts. However, these methods often generate weird artifacts or even fail in real images. To this end, we introduce the Part-Aware Diffusion Model to approach the manipulation of articulated objects in real images. First, we develop Abstract 3D Models to represent and manipulate articulated objects efficiently. Then we propose dynamic feature maps to transfer the appearance of objects from input images to edited ones, meanwhile generating the novel-appearing parts reasonably. Extensive experiments are provided to illustrate the advanced manipulation capabilities of our method concerning state-of-the-art editing works. Additionally, we verify our method on 3D articulated object understanding forembodied robot scenarios and the promising results prove that our method supports this task strongly. The project page is https://mvig-rhos.com/pa_diffusion.