Poster
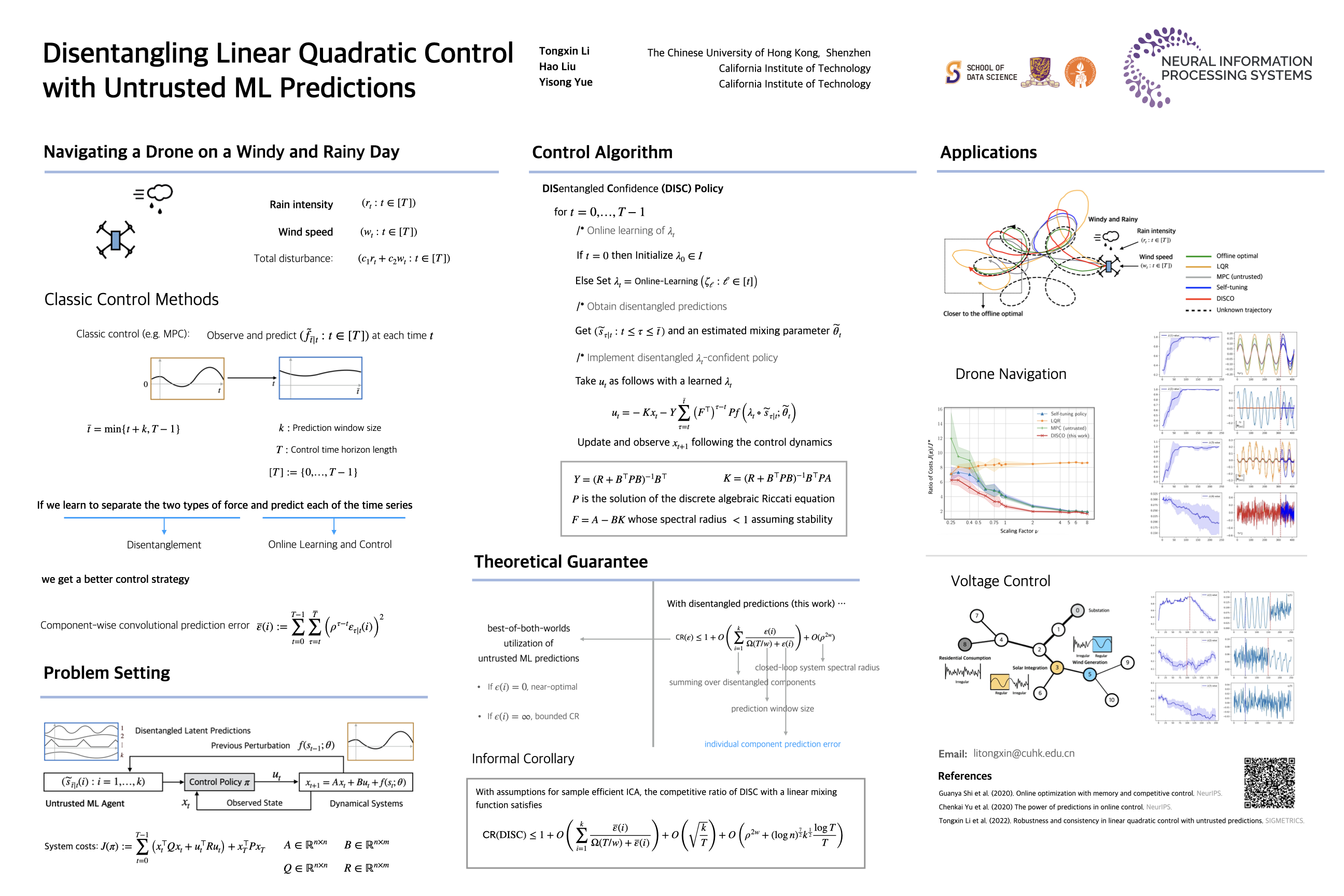
Disentangling Linear Quadratic Control with Untrusted ML Predictions
Tongxin Li · Hao Liu · Yisong Yue
West Ballroom A-D #6204
{kind=link}
Uncertain perturbations in dynamical systems often arise from diverse resources, represented by latent components. The predictions for these components, typically generated by "black-box" machine learning tools, are prone to inaccuracies. To tackle this challenge, we introduce DISC, a novel policy that learns a confidence parameter online to harness the potential of accurate predictions while also mitigating the impact of erroneous forecasts. When predictions are precise, DISC leverages this information to achieve near-optimal performance. Conversely, in the case of significant prediction errors, it still has a worst-case competitive ratio guarantee. We provide competitive ratio bounds for DISC under both linear mixing of latent variables as well as a broader class of mixing functions. Our results highlight a first-of-its-kind "best-of-both-worlds" integration of machine-learned predictions, thus lead to a near-optimal consistency and robustness tradeoff, which provably improves what can be obtained without learning the confidence parameter. We validate the applicability of DISC across a spectrum of practical scenarios.