Poster
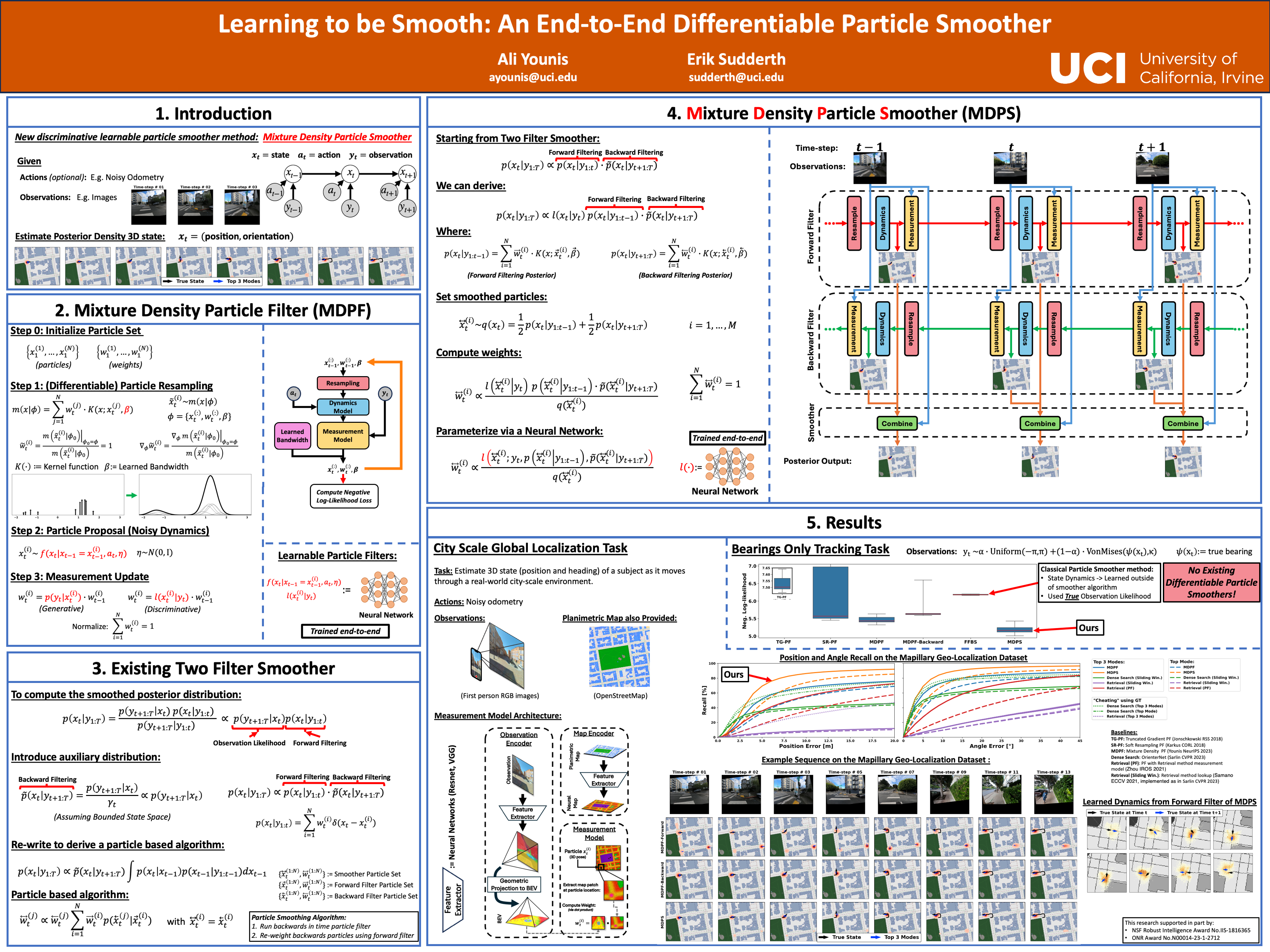
Learning to be Smooth: An End-to-End Differentiable Particle Smoother
Ali Younis · Erik Sudderth
East Exhibit Hall A-C #3709
{kind=link}
For challenging state estimation problems arising in domains like vision and robotics, particle-based representations attractively enable temporal reasoning about multiple posterior modes. Particle smoothers offer the potential for more accurate offline data analysis by propagating information both forward and backward in time, but have classically required human-engineered dynamics and observation models. Extending recent advances in discriminative training of particle filters, we develop a framework for low-variance propagation of gradients across long time sequences when training particle smoothers. Our "two-filter" smoother integrates particle streams that are propagated forward and backward in time, while incorporating stratification and importance weights in the resampling step to provide low-variance gradient estimates for neural network dynamics and observation models. The resulting mixture density particle smoother is substantially more accurate than state-of-the-art particle filters, as well as search-based baselines, for city-scale global vehicle localization from real-world videos and maps.