Spotlight Poster
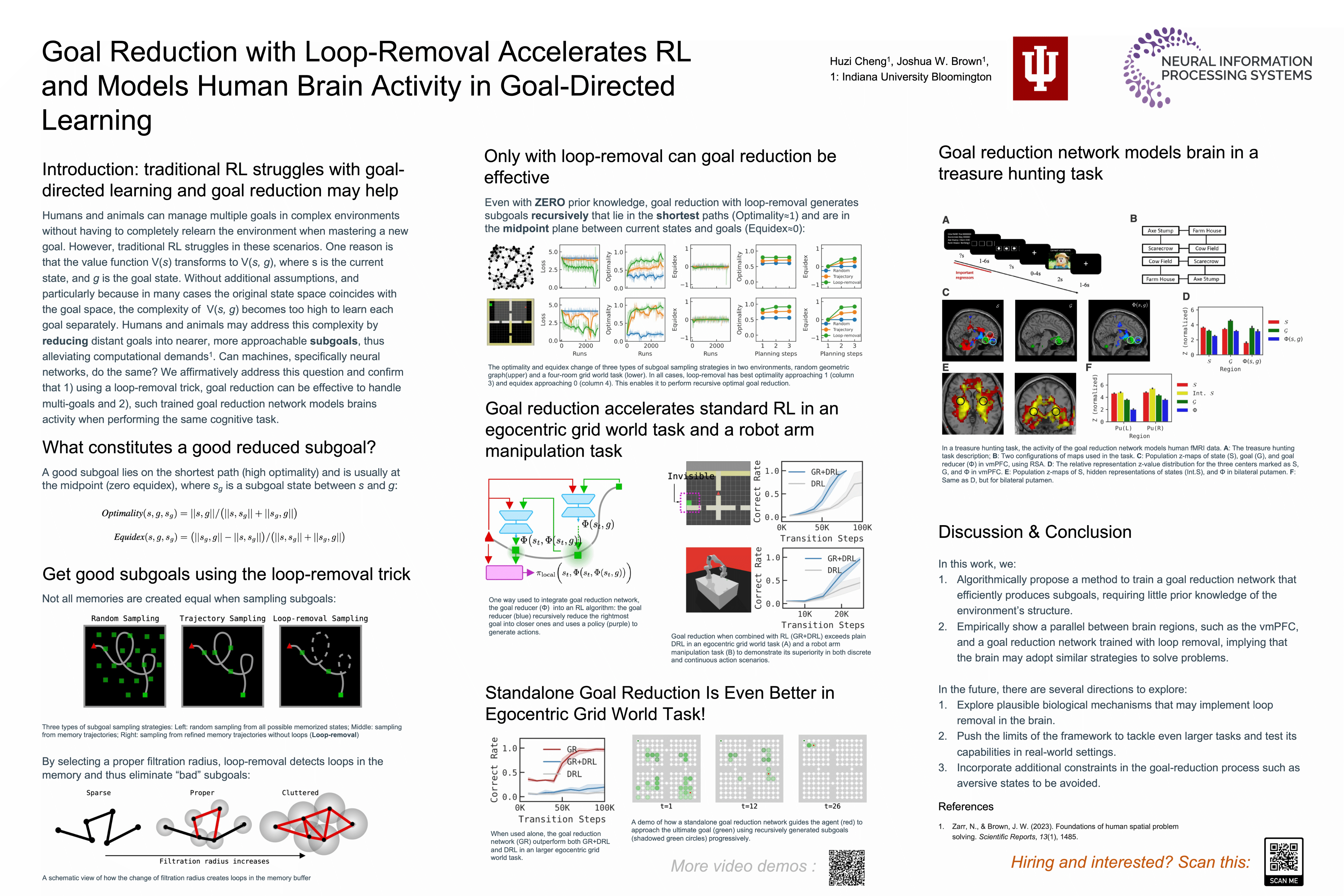
Goal Reduction with Loop-Removal Accelerates RL and Models Human Brain Activity in Goal-Directed Learning
Huzi Cheng · Joshua Brown
West Ballroom A-D #6201
{kind=link}
Goal-directed planning presents a challenge for classical RL algorithms due to the vastness of the combinatorial state and goal spaces, while humans and animals adapt to complex environments, especially with diverse, non-stationary objectives, often employing intermediate goals for long-horizon tasks.Here, we propose a goal reduction mechanism for effectively deriving subgoals from arbitrary and distant original goals, using a novel loop-removal technique.The product of the method, called goal-reducer, distills high-quality subgoals from a replay buffer, all without the need for prior global environmental knowledge.Simulations show that the goal-reducer can be integrated into RL frameworks like Deep Q-learning and Soft Actor-Critic.It accelerates performance in both discrete and continuous action space tasks, such as grid world navigation and robotic arm manipulation, relative to the corresponding standard RL models.Moreover, the goal-reducer, when combined with a local policy, without iterative training, outperforms its integrated deep RL counterparts in solving a navigation task.This goal reduction mechanism also models human problem-solving.Comparing the model's performance and activation with human behavior and fMRI data in a treasure hunting task, we found matching representational patterns between an goal-reducer agent's components and corresponding human brain areas, particularly the vmPFC and basal ganglia. The results suggest that humans may use a similar computational framework for goal-directed behaviors.