Poster
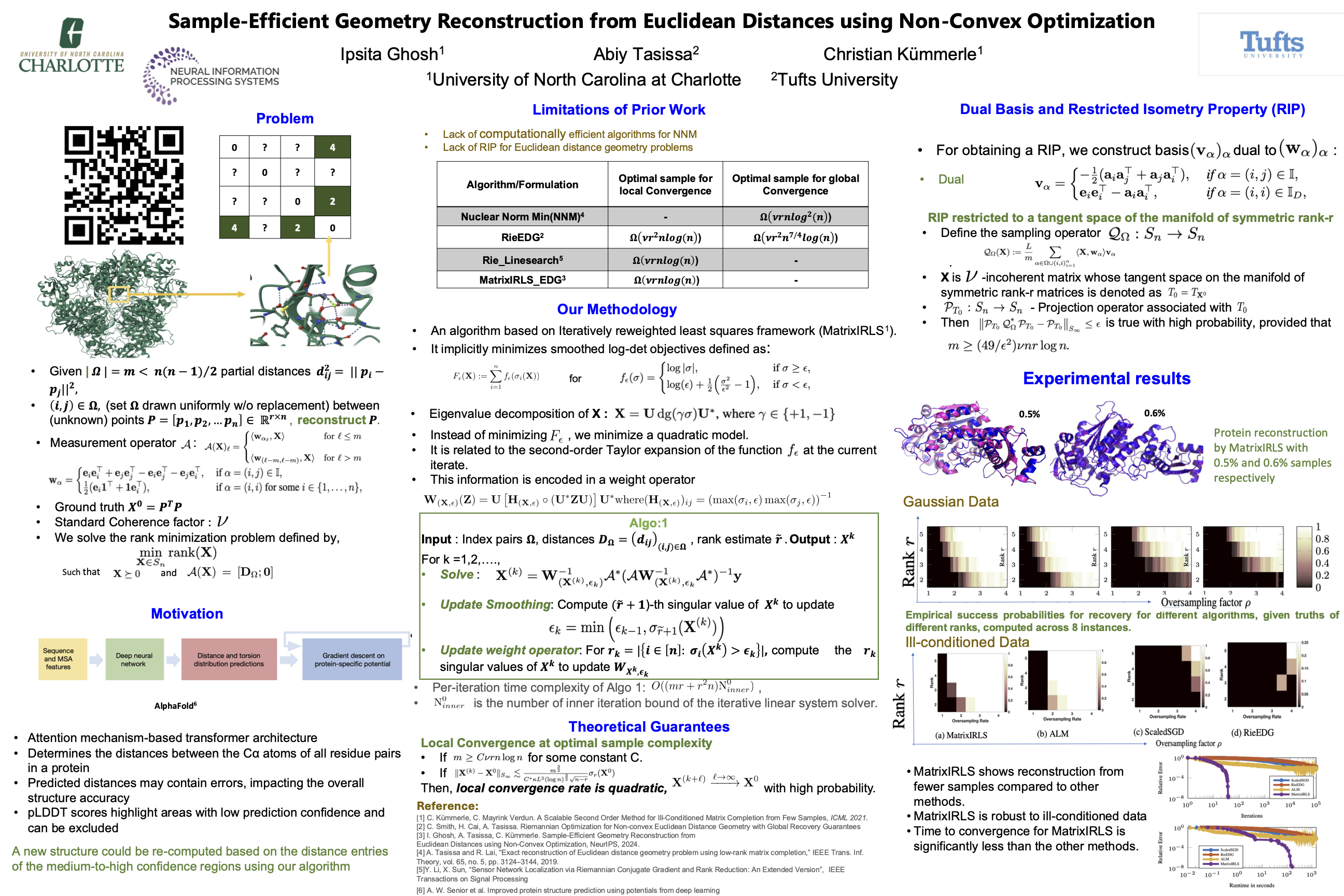
Sample-Efficient Geometry Reconstruction from Euclidean Distances using Non-Convex Optimization
Ipsita Ghosh · Abiy Tasissa · Christian Kümmerle
West Ballroom A-D #5911
{kind=link}
Abstract:
The problem of finding suitable point embedding or geometric configurations given only Euclidean distance information of point pairs arises both as a core task and as a sub-problem in a variety of machine learning applications. In this paper, we aim to solve this problem given a minimal number of distance samples. To this end, we leverage continuous and non-convex rank minimization formulations of the problem and establish a local convergence guarantee for a variant of iteratively reweighted least squares (IRLS), which applies if a minimal random set of observed distances is provided. As a technical tool, we establish a restricted isometry property (RIP) restricted to a tangent space of the manifold of symmetric rank-$r$ matrices given random Euclidean distance measurements, which might be of independent interest for the analysis of other non-convex approaches. Furthermore, we assess data efficiency, scalability and generalizability of different reconstruction algorithms through numerical experiments with simulated data as well as real-world data, demonstrating the proposed algorithm's ability to identify the underlying geometry from fewer distance samples compared to the state-of-the-art. The Matlab code can be found at \href{https://github.com/ipsita-ghosh-1/EDG-IRLS}{github\_SEGRED}
Chat is not available.