Spotlight Poster
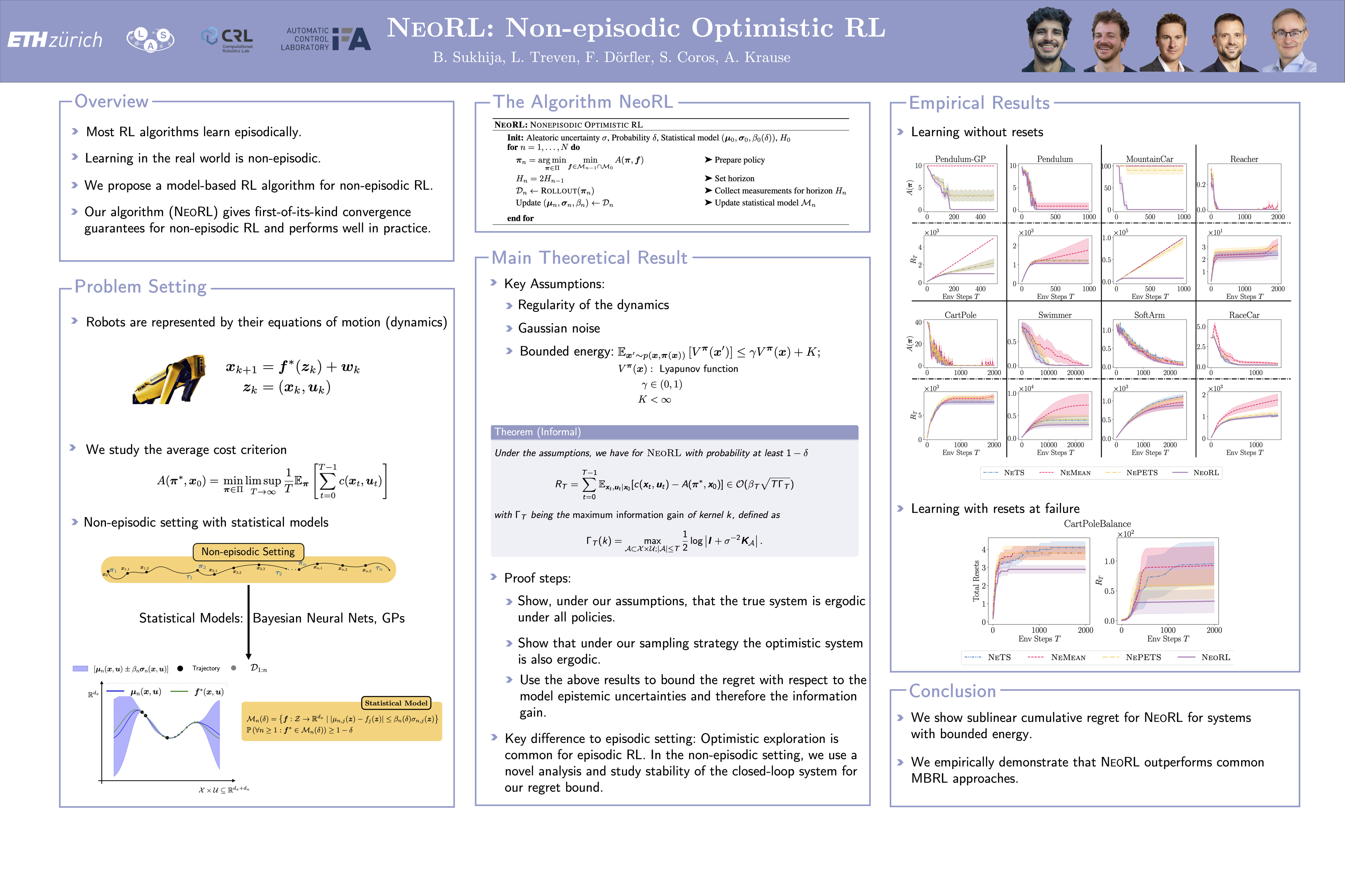
NeoRL: Efficient Exploration for Nonepisodic RL
Bhavya · Lenart Treven · Florian Dorfler · Stelian Coros · Andreas Krause
West Ballroom A-D #6710
{kind=link}
Abstract:
We study the problem of nonepisodic reinforcement learning (RL) for nonlinear dynamical systems, where the system dynamics are unknown and the RL agent has to learn from a single trajectory, i.e., without resets. We propose **N**on**e**pisodic **O**ptistmic **RL** (NeoRL), an approach based on the principle of optimism in the face of uncertainty. NeoRL uses well-calibrated probabilistic models and plans optimistically w.r.t. the epistemic uncertainty about the unknown dynamics. Under continuity and bounded energy assumptions on the system, weprovide a first-of-its-kind regret bound of $\mathcal{O}(\beta_T \sqrt{T \Gamma_T})$ for general nonlinear systems with Gaussian process dynamics. We compare NeoRL to other baselines on several deep RL environments and empirically demonstrate that NeoRL achieves the optimal average cost while incurring the least regret.
Chat is not available.