Poster
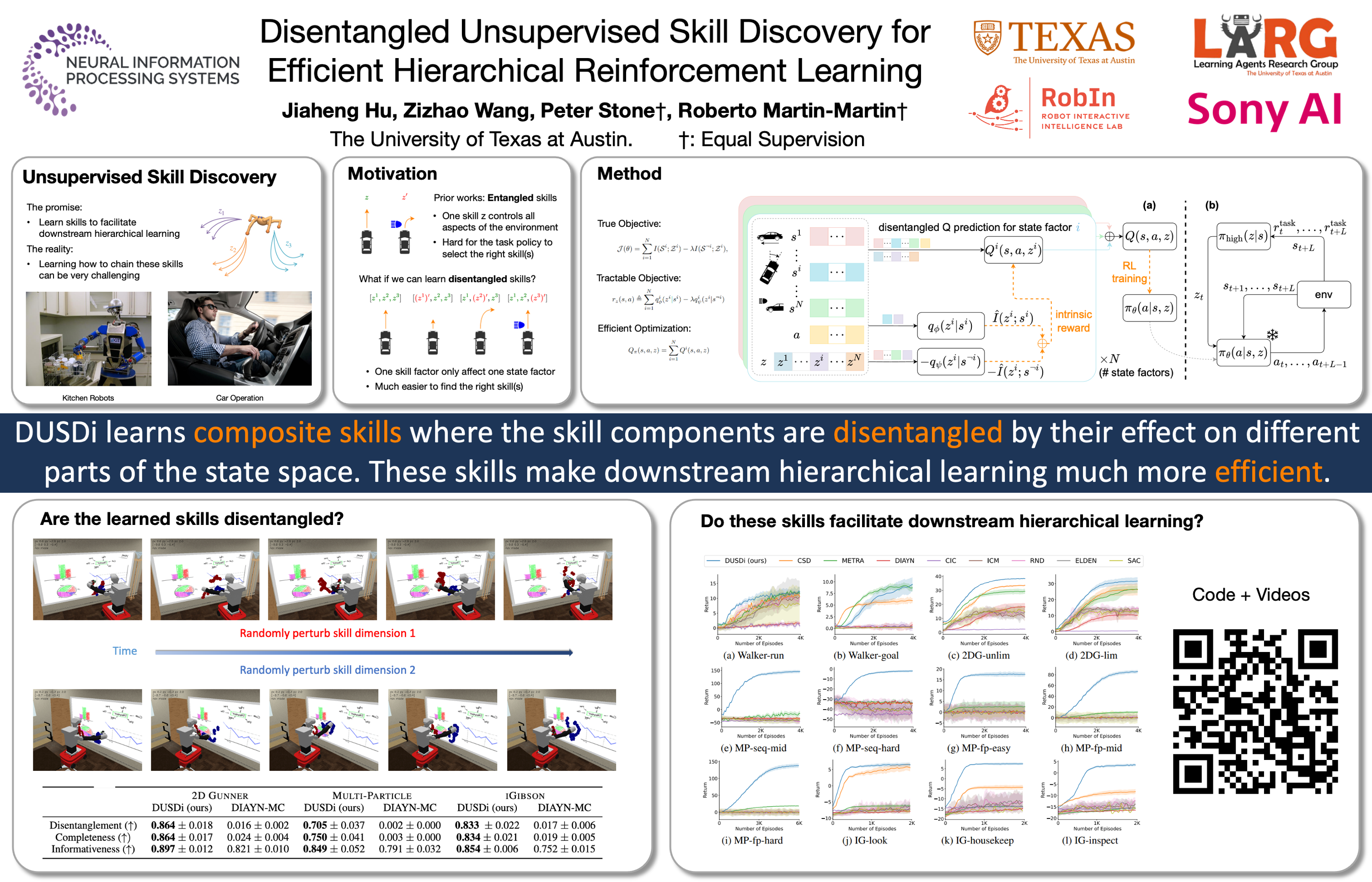
Disentangled Unsupervised Skill Discovery for Efficient Hierarchical Reinforcement Learning
Jiaheng Hu · Zizhao Wang · Peter Stone · Roberto Martín-Martín
West Ballroom A-D #6406
{kind=link}
A hallmark of intelligent agents is the ability to learn reusable skills purely from unsupervised interaction with the environment. However, existing unsupervised skill discovery methods often learn entangled skills where one skill variable simultaneously influences many entities in the environment, making downstream skill chaining extremely challenging. We propose Disentangled Unsupervised Skill Discovery (DUSDi), a method for learning disentangled skills that can be efficiently reused to solve downstream tasks. DUSDi decomposes skills into disentangled components, where each skill component only affects one factor of the state space. Importantly, these skill components can be concurrently composed to generate low-level actions, and efficiently chained to tackle downstream tasks through hierarchical Reinforcement Learning. DUSDi defines a novel mutual-information-based objective to enforce disentanglement between the influences of different skill components, and utilizes value factorization to optimize this objective efficiently. Evaluated in a set of challenging environments, DUSDi successfully learns disentangled skills, and significantly outperforms previous skill discovery methods when it comes to applying the learned skills to solve downstream tasks.