Poster
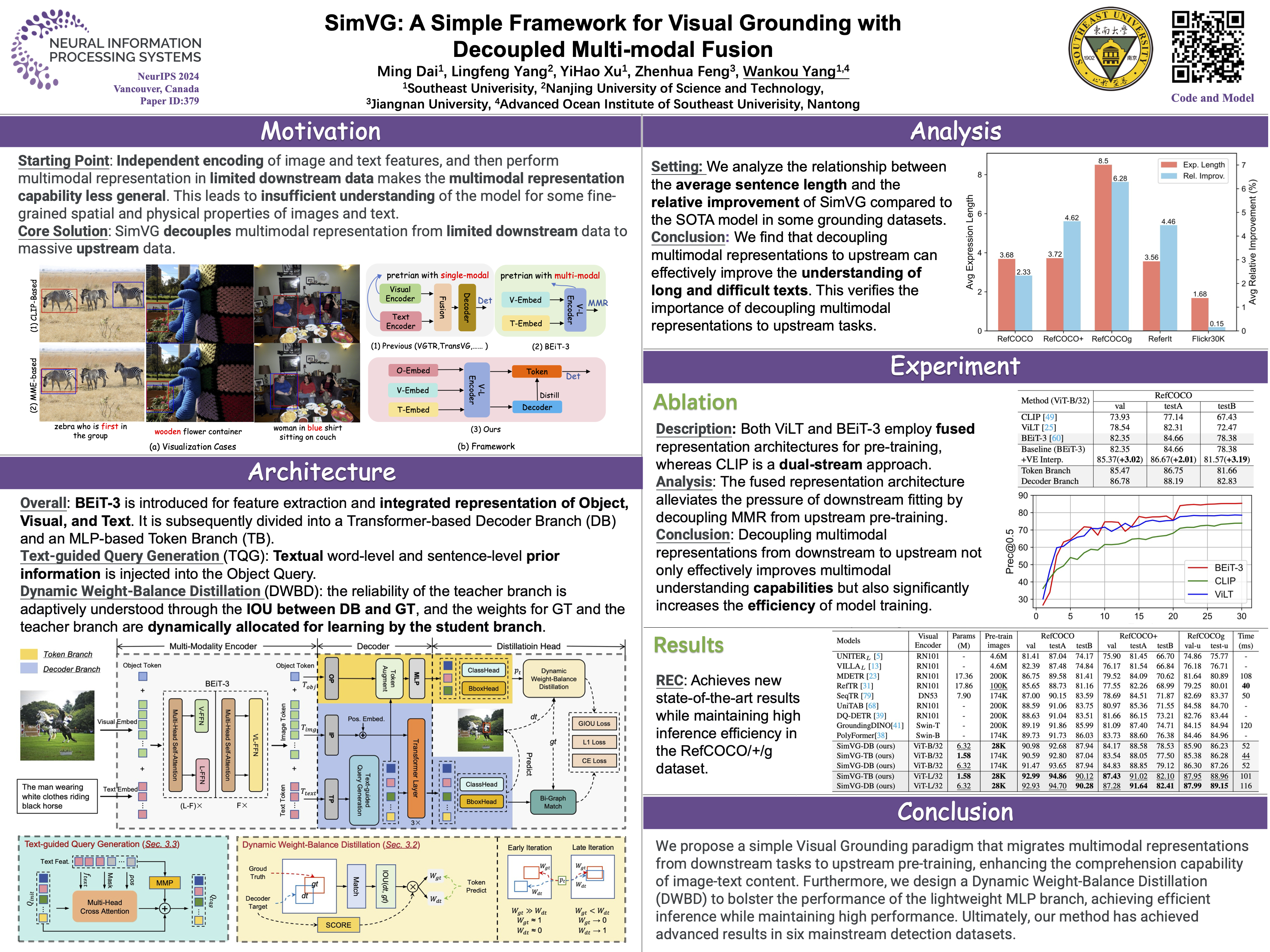
SimVG: A Simple Framework for Visual Grounding with Decoupled Multi-modal Fusion
Ming Dai · Lingfeng Yang · Yihao Xu · Zhenhua Feng · Wankou Yang
West Ballroom A-D #7201
{kind=link}
Visual grounding is a common vision task that involves grounding descriptive sentences to the corresponding regions of an image. Most existing methods use independent image-text encoding and apply complex hand-crafted modules or encoder-decoder architectures for modal interaction and query reasoning. However, their performance significantly drops when dealing with complex textual expressions. This is because the former paradigm only utilizes limited downstream data to fit the multi-modal feature fusion. Therefore, it is only effective when the textual expressions are relatively simple. In contrast, given the wide diversity of textual expressions and the uniqueness of downstream training data, the existing fusion module, which extracts multimodal content from a visual-linguistic context, has not been fully investigated. In this paper, we present a simple yet robust transformer-based framework, SimVG, for visual grounding. Specifically, we decouple visual-linguistic feature fusion from downstream tasks by leveraging existing multimodal pre-trained models and incorporating additional object tokens to facilitate deep integration of downstream and pre-training tasks. Furthermore, we design a dynamic weight-balance distillation method in the multi-branch synchronous learning process to enhance the representation capability of the simpler branch. This branch only consists of a lightweight MLP, which simplifies the structure and improves reasoning speed. Experiments on six widely used VG datasets, i.e., RefCOCO/+/g, ReferIt, Flickr30K, and GRefCOCO, demonstrate the superiority of SimVG. Finally, the proposed method not only achieves improvements in efficiency and convergence speed but also attains new state-of-the-art performance on these benchmarks. Codes and models are available at https://github.com/Dmmm1997/SimVG.