Poster
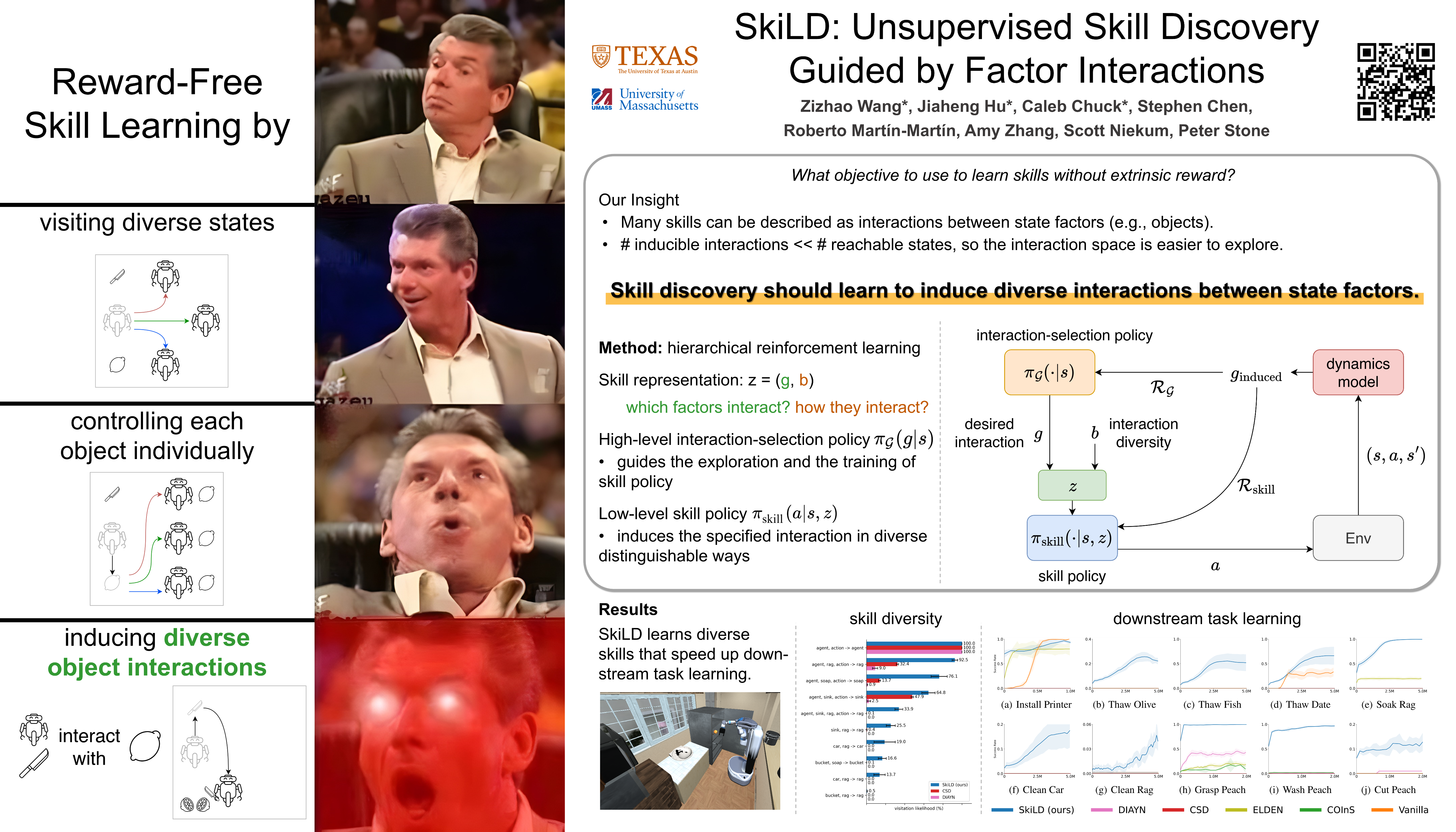
SkiLD: Unsupervised Skill Discovery Guided by Factor Interactions
Zizhao Wang · Jiaheng Hu · Caleb Chuck · Stephen Chen · Roberto Martín-Martín · Amy Zhang · Scott Niekum · Peter Stone
West Ballroom A-D #6504
{kind=link}
Unsupervised skill discovery carries the promise that an intelligent agent can learn reusable skills through autonomous, reward-free interactions with environments. Existing unsupervised skill discovery methods learn skills by encouraging distinguishable behaviors that cover diverse states. However, in complex environments with many state factors (e.g., household environments with many objects), learning skills that cover all possible states is impossible, and naively encouraging state diversity often leads to simple skills that are not ideal for solving downstream tasks. This work introduces Skill Discovery from Local Dependencies (SkiLD), which leverages state factorization as a natural inductive bias to guide the skill learning process. The key intuition guiding SkiLD is that skills that induce \textbf{diverse interactions} between state factors are often more valuable for solving downstream tasks. To this end, SkiLD develops a novel skill learning objective that explicitly encourages the mastering of skills that effectively induce different interactions within an environment. We evaluate SkiLD in several domains with challenging, long-horizon sparse reward tasks including a realistic simulated household robot domain, where SkiLD successfully learns skills with clear semantic meaning and shows superior performance compared to existing unsupervised reinforcement learning methods that only maximize state coverage.