Poster
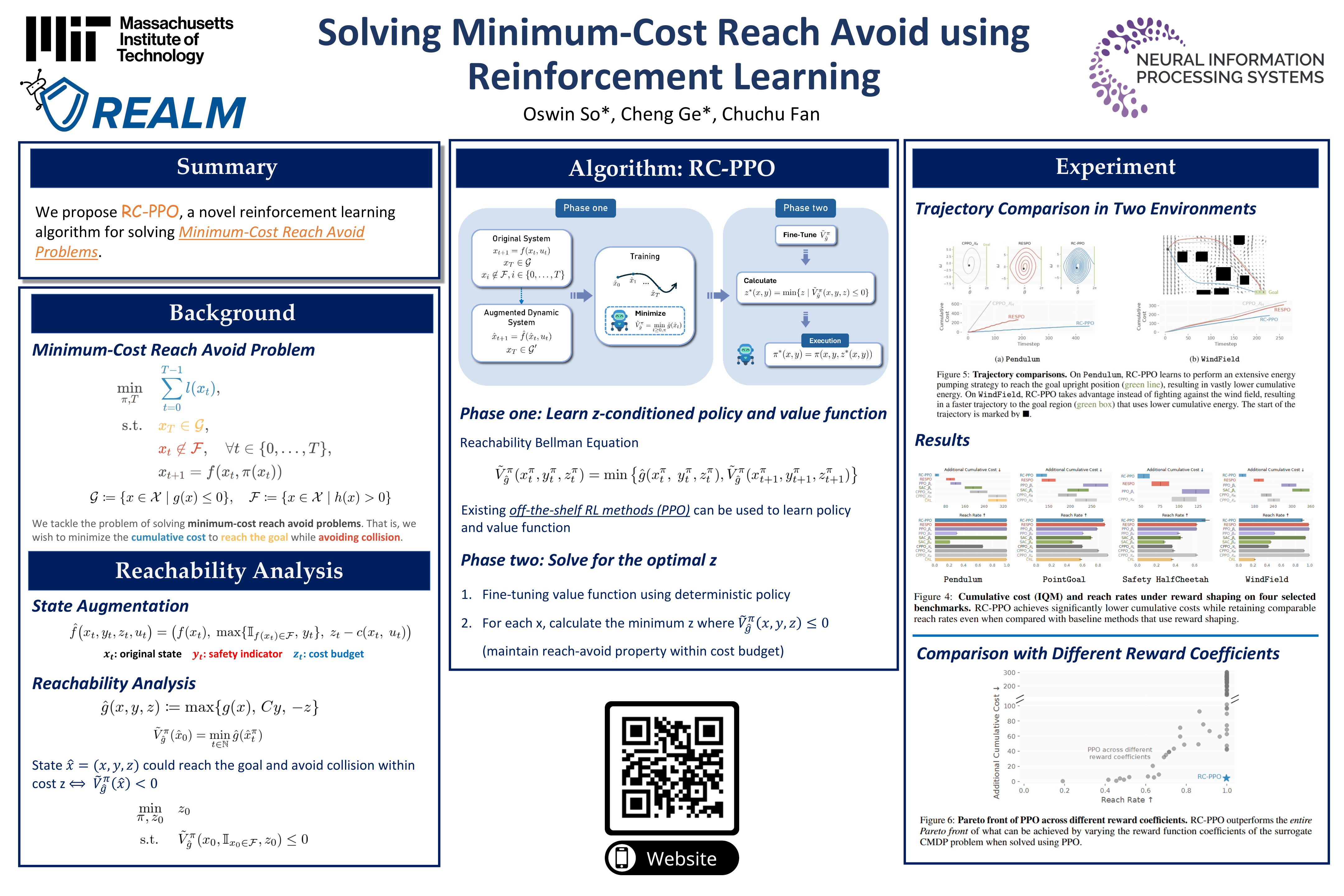
Solving Minimum-Cost Reach Avoid using Reinforcement Learning
Oswin So · Cheng Ge · Chuchu Fan
West Ballroom A-D #6012
{kind=link}
Current reinforcement-learning methods are unable to directly learn policies that solve the minimum cost reach-avoid problem to minimize cumulative costs subject to the constraints of reaching the goal and avoiding unsafe states, as the structure of this new optimization problem is incompatible with current methods. Instead, a surrogate problem is solved where all objectives are combined with a weighted sum. However, this surrogate objective results in suboptimal policies that do not directly minimize the cumulative cost. In this work, we propose RC-PPO, a reinforcement-learning-based method for solving the minimum-cost reach-avoid problem by using connections to Hamilton-Jacobi reachability. Empirical results demonstrate that RC-PPO learns policies with comparable goal-reaching rates to while achieving up to 57% lower cumulative costs compared to existing methods on a suite of minimum-cost reach-avoid benchmarks on the Mujoco simulator. The project page can be found at https://oswinso.xyz/rcppo.