Poster
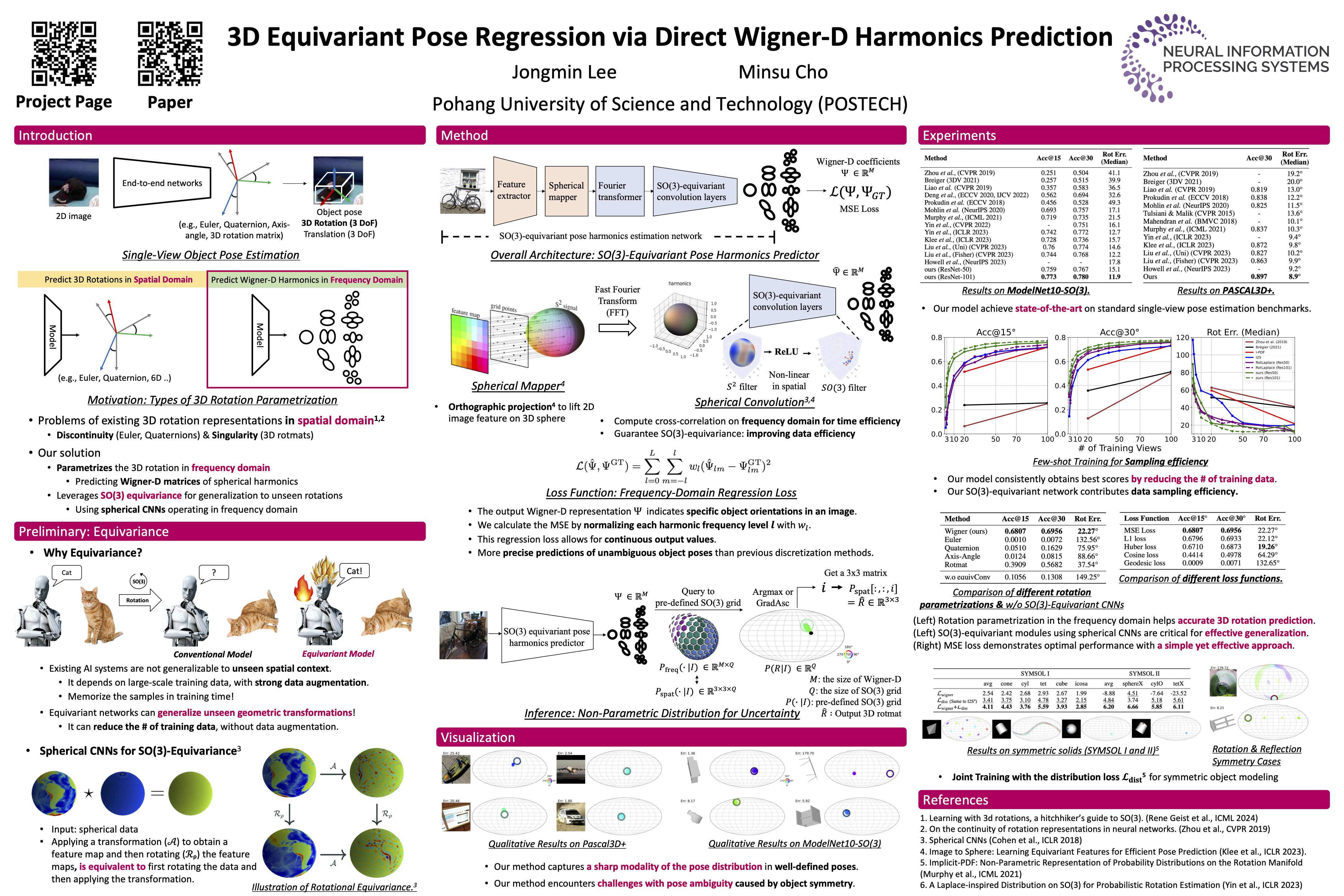
3D Equivariant Pose Regression via Direct Wigner-D Harmonics Prediction
Jongmin Lee · Minsu Cho
East Exhibit Hall A-C #1303
{kind=link}
Determining the 3D orientations of an object in an image, known as single-image pose estimation, is a crucial task in 3D vision applications. Existing methods typically learn 3D rotations parametrized in the spatial domain using Euler angles or quaternions, but these representations often introduce discontinuities and singularities. SO(3)-equivariant networks enable the structured capture of pose patterns with data-efficient learning, but the parametrizations in spatial domain are incompatible with their architecture, particularly spherical CNNs, which operate in the frequency domain to enhance computational efficiency. To overcome these issues, we propose a frequency-domain approach that directly predicts Wigner-D coefficients for 3D rotation regression, aligning with the operations of spherical CNNs. Our SO(3)-equivariant pose harmonics predictor overcomes the limitations of spatial parameterizations, ensuring consistent pose estimation under arbitrary rotations. Trained with a frequency-domain regression loss, our method achieves state-of-the-art results on benchmarks such as ModelNet10-SO(3) and PASCAL3D+, with significant improvements in accuracy, robustness, and data efficiency.