Poster
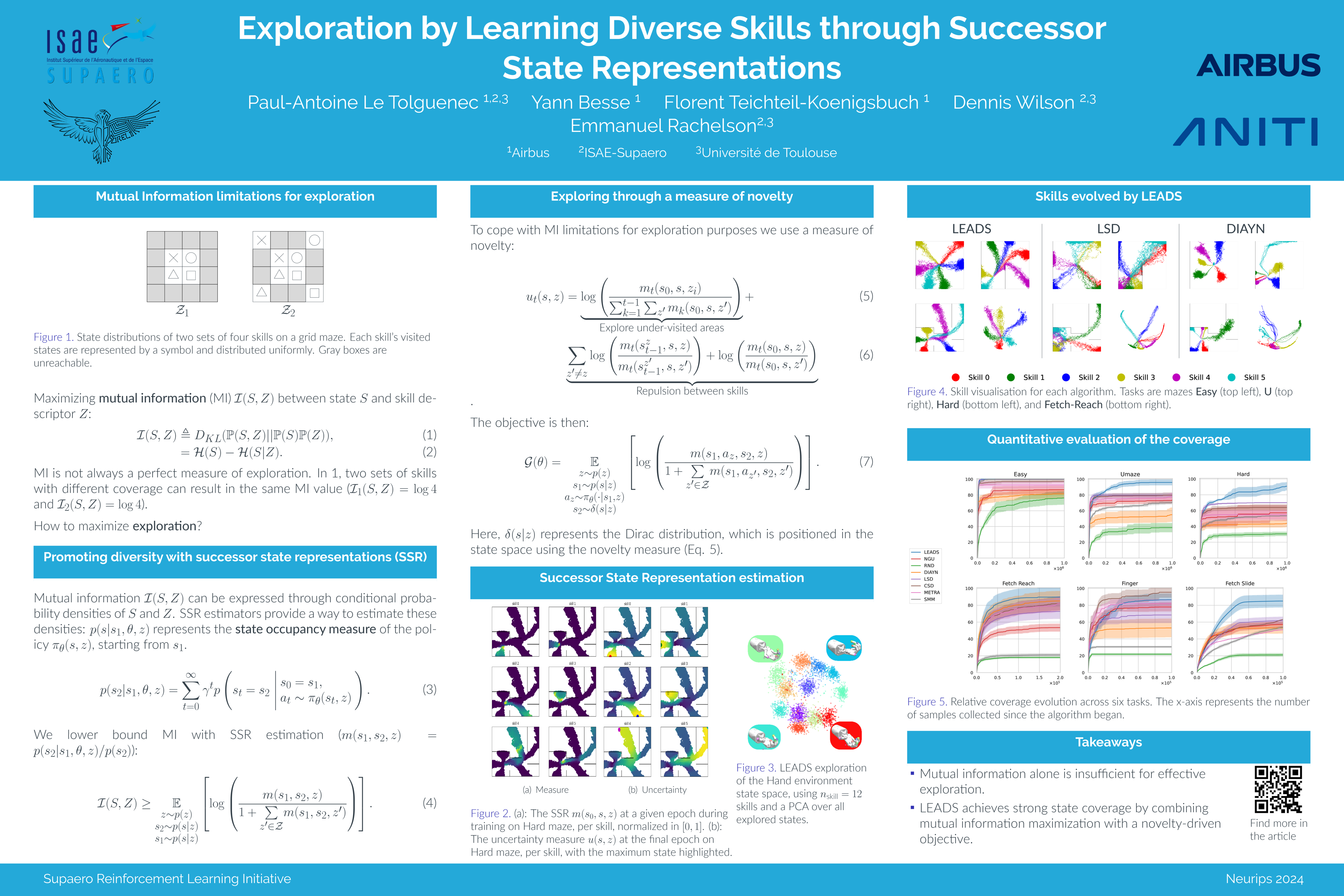
Exploration by Learning Diverse Skills through Successor State Representations
Paul-Antoine LE TOLGUENEC · Yann BESSE · Florent Teichteil-Koenigsbuch · Dennis Wilson · Emmanuel Rachelson
East Exhibit Hall A-C #4909
{kind=link}
The ability to perform different skills can encourage agents to explore. In this work, we aim to construct a set of diverse skills that uniformly cover the state space. We propose a formalization of this search for diverse skills, building on a previous definition based on the mutual information between states and skills. We consider the distribution of states reached by a policy conditioned on each skill and leverage the successor state representation to maximize the difference between these skill distributions. We call this approach LEADS: Learning Diverse Skills through Successor State Representations. We demonstrate our approach on a set of maze navigation and robotic control tasks which show that our method is capable of constructing a diverse set of skills which exhaustively cover the state space without relying on reward or exploration bonuses. Our findings demonstrate that this new formalization promotes more robust and efficient exploration by combining mutual information maximization and exploration bonuses.