Poster
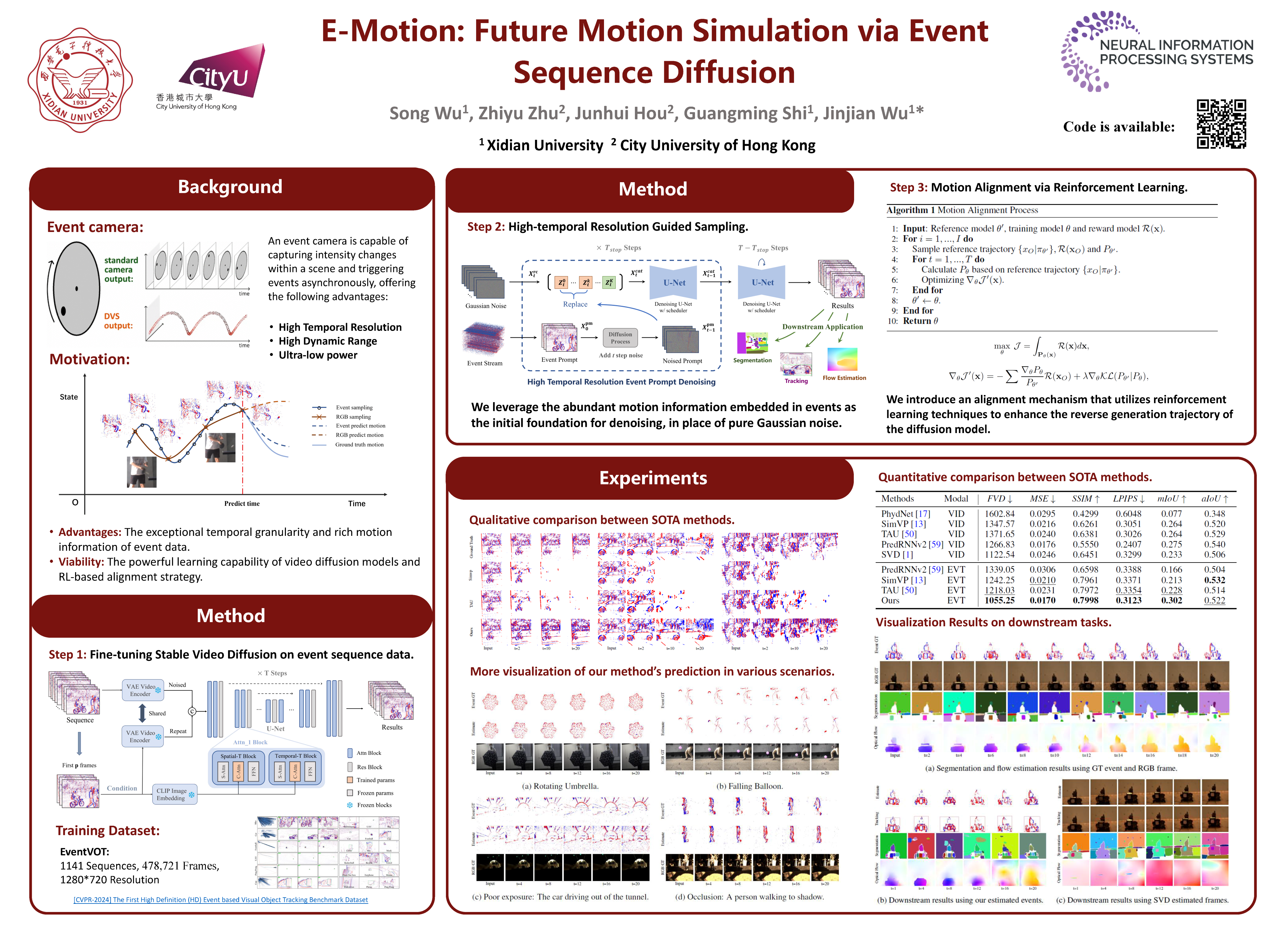
E-Motion: Future Motion Simulation via Event Sequence Diffusion
Song Wu · Zhiyu Zhu · Junhui Hou · GUANGMING Shi · Jinjian Wu
East Exhibit Hall A-C #1400
{kind=link}
Forecasting a typical object's future motion is a critical task for interpreting and interacting with dynamic environments in computer vision. Event-based sensors, which could capture changes in the scene with exceptional temporal granularity, may potentially offer a unique opportunity to predict future motion with a level of detail and precision previously unachievable. Inspired by that, we propose to integrate the strong learning capacity of the video diffusion model with the rich motion information of an event camera as a motion simulation framework. Specifically, we initially employ pre-trained stable video diffusion models to adapt the event sequence dataset. This process facilitates the transfer of extensive knowledge from RGB videos to an event-centric domain. Moreover, we introduce an alignment mechanism that utilizes reinforcement learning techniques to enhance the reverse generation trajectory of the diffusion model, ensuring improved performance and accuracy. Through extensive testing and validation, we demonstrate the effectiveness of our method in various complex scenarios, showcasing its potential to revolutionize motion flow prediction in computer vision applications such as autonomous vehicle guidance, robotic navigation, and interactive media. Our findings suggest a promising direction for future research in enhancing the interpretative power and predictive accuracy of computer vision systems. The source code ispublicly available at https://github.com/p4r4mount/E-Motion.