Poster
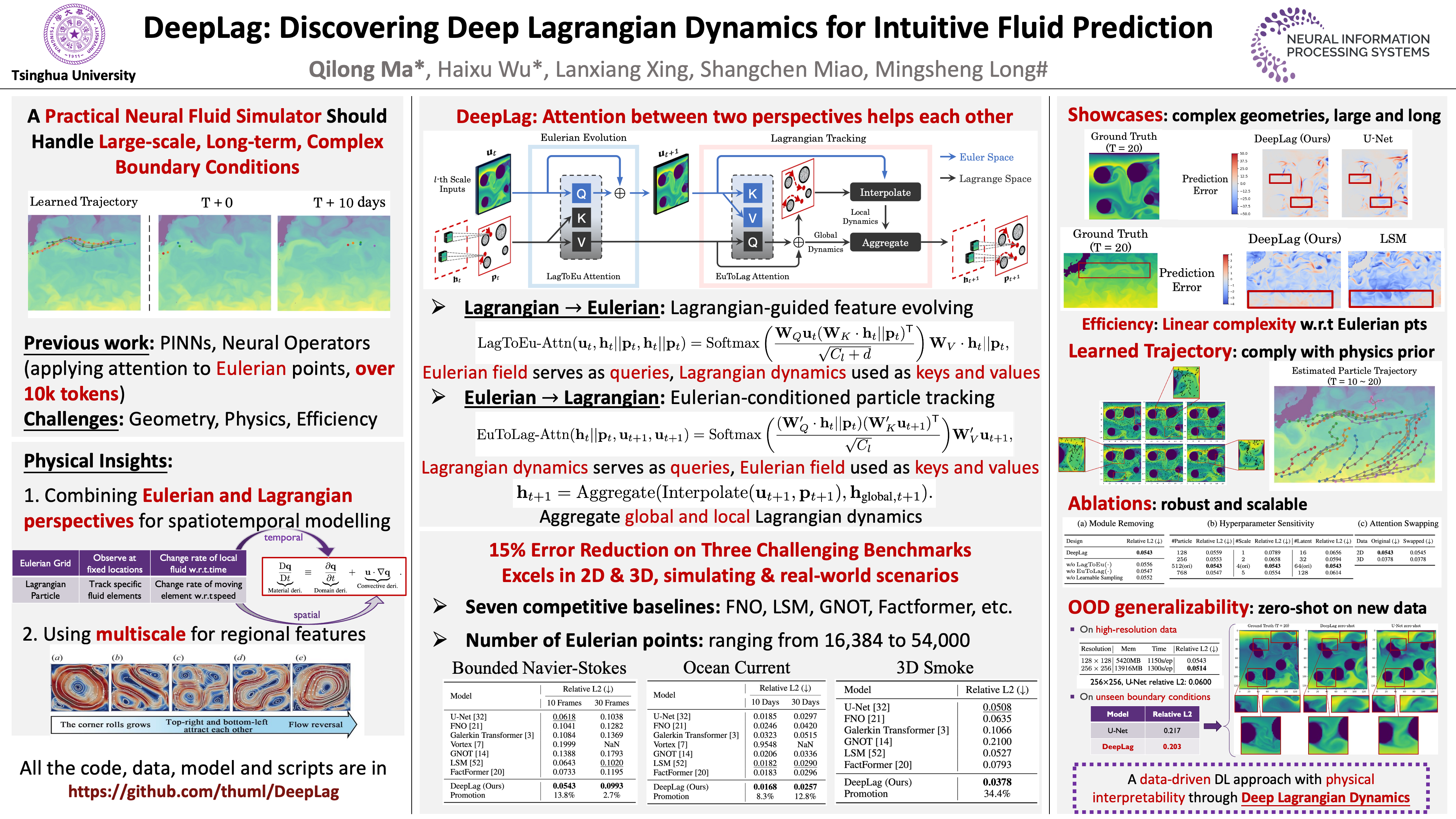
DeepLag: Discovering Deep Lagrangian Dynamics for Intuitive Fluid Prediction
Qilong Ma · Haixu Wu · Lanxiang Xing · Shangchen Miao · Mingsheng Long
East Exhibit Hall A-C #3800
{kind=link}
Accurately predicting the future fluid is vital to extensive areas such as meteorology, oceanology, and aerodynamics. However, since the fluid is usually observed from the Eulerian perspective, its moving and intricate dynamics are seriously obscured and confounded in static grids, bringing thorny challenges to the prediction. This paper introduces a new Lagrangian-Eulerian combined paradigm to tackle the tanglesome fluid dynamics. Instead of solely predicting the future based on Eulerian observations, we propose DeepLag to discover hidden Lagrangian dynamics within the fluid by tracking the movements of adaptively sampled key particles. Further, DeepLag presents a new paradigm for fluid prediction, where the Lagrangian movement of the tracked particles is inferred from Eulerian observations, and their accumulated Lagrangian dynamics information is incorporated into global Eulerian evolving features to guide future prediction respectively. Tracking key particles not only provides a transparent and interpretable clue for fluid dynamics but also makes our model free from modeling complex correlations among massive grids for better efficiency. Experimentally, DeepLag excels in three challenging fluid prediction tasks covering 2D and 3D, simulated and real-world fluids. Code is available at this repository: https://github.com/thuml/DeepLag.