Poster
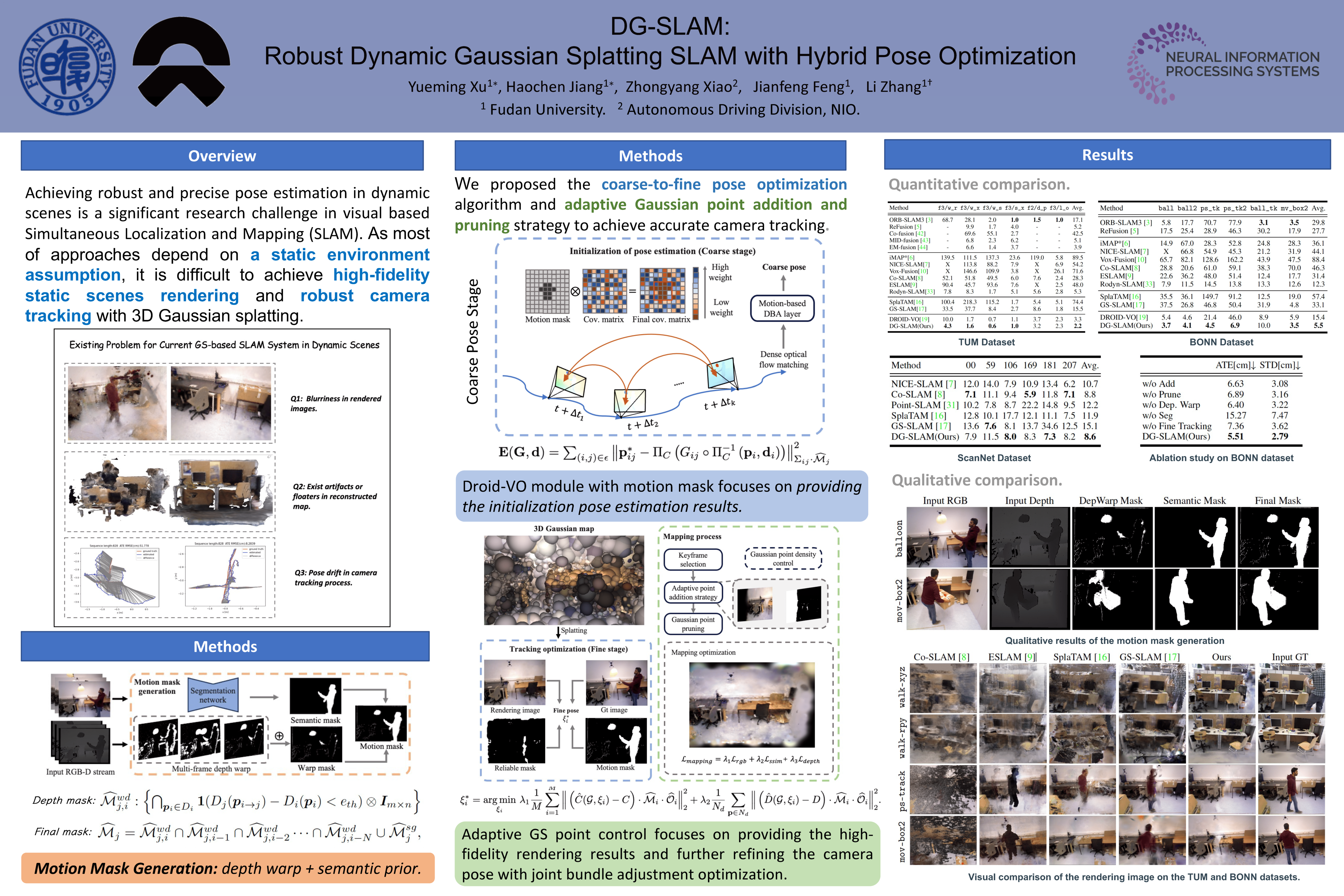
DG-SLAM: Robust Dynamic Gaussian Splatting SLAM with Hybrid Pose Optimization
Yueming Xu · Haochen Jiang · Zhongyang Xiao · Jianfeng Feng · Li Zhang
East Exhibit Hall A-C #4205
{kind=link}
Achieving robust and precise pose estimation in dynamic scenes is a significant research challenge in Visual Simultaneous Localization and Mapping (SLAM). Recent advancements integrating Gaussian Splatting into SLAM systems have proven effective in creating high-quality renderings using explicit 3D Gaussian models, significantly improving environmental reconstruction fidelity. However, these approaches depend on a static environment assumption and face challenges in dynamic environments due to inconsistent observations of geometry and photometry. To address this problem, we propose DG-SLAM, the first robust dynamic visual SLAM system grounded in 3D Gaussians, which provides precise camera pose estimation alongside high-fidelity reconstructions. Specifically, we propose effective strategies, including motion mask generation, adaptive Gaussian point management, and a hybrid camera tracking algorithm to improve the accuracy and robustness of pose estimation. Extensive experiments demonstrate that DG-SLAM delivers state-of-the-art performance in camera pose estimation, map reconstruction, and novel-view synthesis in dynamic scenes, outperforming existing methods meanwhile preserving real-time rendering ability.