Poster
in
Workshop: AI4Mat-2024: NeurIPS 2024 Workshop on AI for Accelerated Materials Design
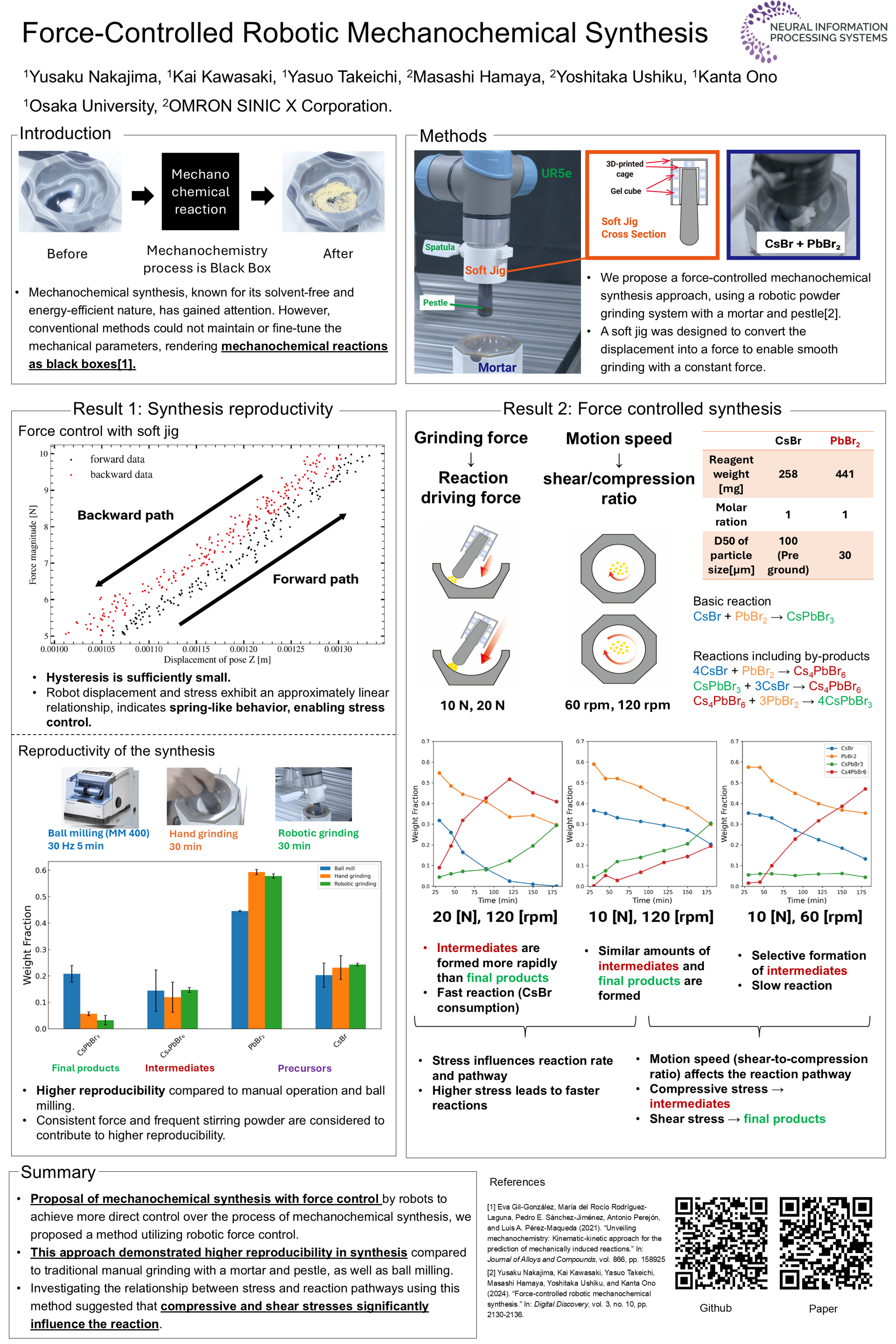
Force-Controlled Robotic Mechanochemical Synthesis
Yusaku Nakajima · Kai Kawasaki · Yasuo Takeichi · Masashi Hamaya · Yoshitaka Ushiku · Kanta Ono
Keywords: [ mechanochemistry ] [ laboratory automation ] [ process control ]
{kind=link}
We have successfully demonstrated a mechanochemical synthesis utilizing a robotic powder grinding system capable of applying a precisely controlled and constant mechanical force. Despite its significance, the application of a controllable constant force in macroscale mechanochemical synthesis remains challenging. To address this gap, we compared the reproducibilities of various mechanochemical syntheses among conventional manual grinding, ball milling, and our novel robotic synthesis approach using perovskite materials. Our findings indicated that the robotic approach provided significantly higher reproducibility than conventional methods. This enhanced reproducibility enables the analysis of reaction kinetics. We examined the effects on the reaction kinetics and path by manipulating the compressive stress and the shear stress. Our results revealed that robotic force control could alter the reaction rate and influence the reaction pathway. Consequently, robotic mechanochemical synthesis has potential for elucidating the chemical reaction mechanisms and fostering the discovery of new chemical reactions.