Poster
in
Workshop: NeurIPS 2024 Workshop: Machine Learning and the Physical Sciences
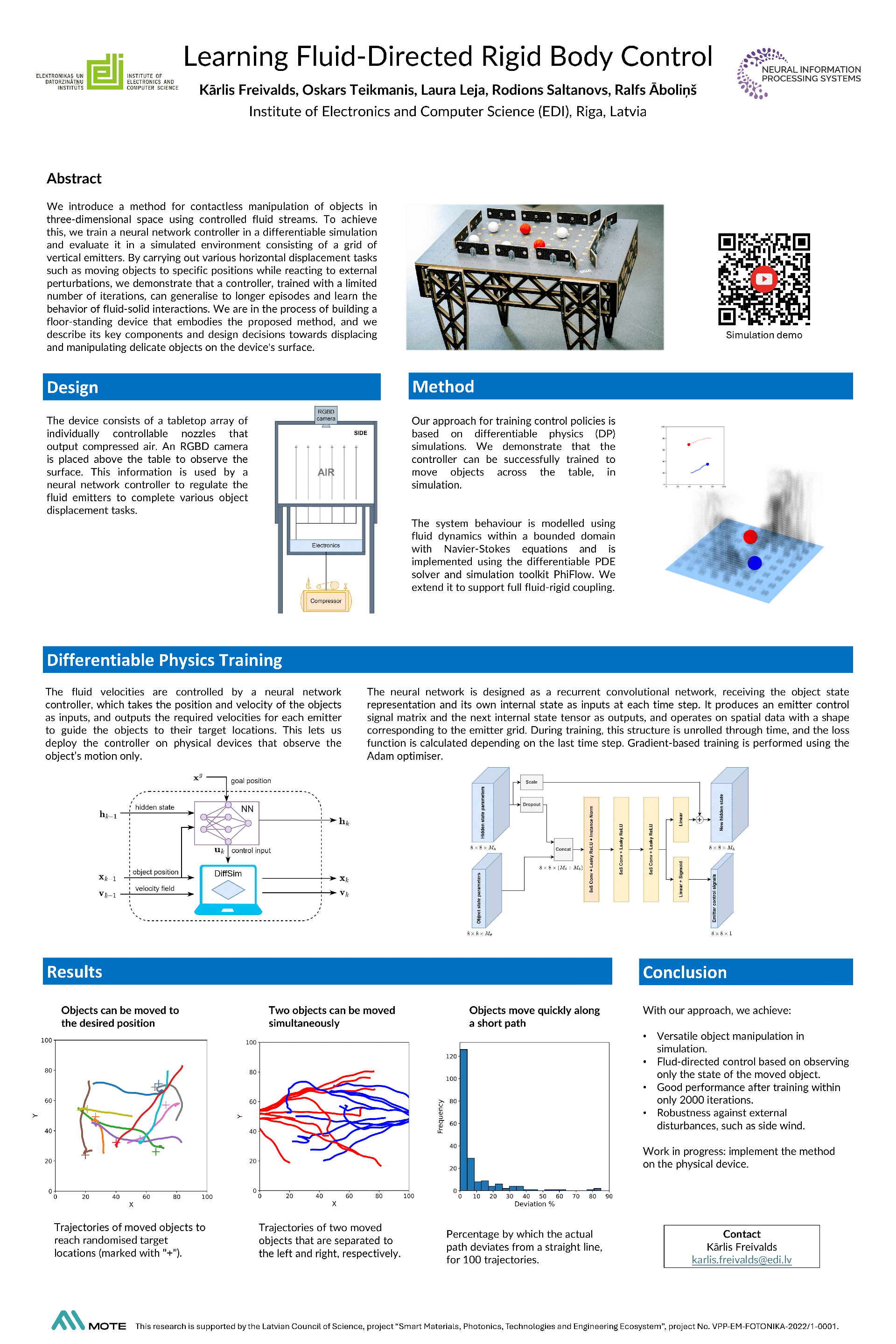
Learning Fluid-Directed Rigid Body Control
Kārlis Freivalds · Oskars Teikmanis · Laura Leja · Saltanovs Rodions · Ralfs Āboliņš
{kind=link}
We introduce a method for contactless manipulation of objects in three-dimensional space using controlled fluid streams. To achieve this, we train a neural network controller in a differentiable simulation and evaluate it in a simulated environment consisting of a grid of vertical emitters. By carrying out various horizontal displacement tasks such as moving objects to specific positions while reacting to external perturbations, we demonstrate that a controller, trained with a limited number of iterations, can generalise to longer episodes and learn the complex dynamics of fluid-solid interactions. We are in the process of building a floor-standing device that embodies the proposed method, and we describe its key components and design decisions towards displacing and manipulating delicate objects on the device's surface.