[ Hall J ]
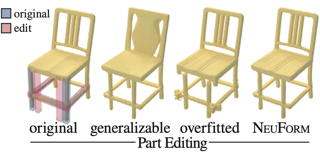
Neural representations are popular for representing shapes as they can be used for data cleanup, model completion, shape editing, and shape synthesis. Current neural representations can be categorized as either overfitting to a single object instance, or representing a collection of objects. However, neither allows accurate editing of neural scene representations: on the one hand, methods that overfit objects achieve highly accurate reconstructions but do not support editing, as they do not generalize to unseen object configurations; on the other hand, methods that represent a family of objects with variations do generalize but produce approximate reconstructions. We propose NeuForm to combine the advantages of both overfitted and generalizable representations by adaptively overfitting a generalizable representation to regions where reliable data is available, while using the generalizable representation everywhere else. We achieve this with a carefully designed architecture and an approach that blends the network weights of the two representations. We demonstrate edits that successfully reconfigure parts of human-made shapes, such as chairs, tables, and lamps, while preserving the accuracy of an overfitted shape representation. We compare with two state-of-the-art competitors and demonstrate clear improvements in terms of plausibility and fidelity of the resultant edits.
[ Hall J ]
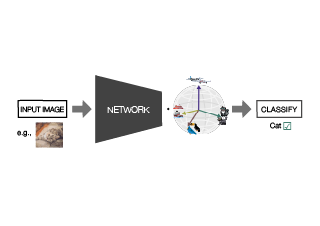
Maximizing the separation between classes constitutes a well-known inductive bias in machine learning and a pillar of many traditional algorithms. By default, deep networks are not equipped with this inductive bias and therefore many alternative solutions have been proposed through differential optimization. Current approaches tend to optimize classification and separation jointly: aligning inputs with class vectors and separating class vectors angularly. This paper proposes a simple alternative: encoding maximum separation as an inductive bias in the network by adding one fixed matrix multiplication before computing the softmax activations. The main observation behind our approach is that separation does not require optimization but can be solved in closed-form prior to training and plugged into a network. We outline a recursive approach to obtain the matrix consisting of maximally separable vectors for any number of classes, which can be added with negligible engineering effort and computational overhead. Despite its simple nature, this one matrix multiplication provides real impact. We show that our proposal directly boosts classification, long-tailed recognition, out-of-distribution detection, and open-set recognition, from CIFAR to ImageNet. We find empirically that maximum separation works best as a fixed bias; making the matrix learnable adds nothing to the performance. The closed-form implementation and …
[ Hall J ]
Predicting multimodal future behavior of traffic participants is essential for robotic vehicles to make safe decisions. Existing works explore to directly predict future trajectories based on latent features or utilize dense goal candidates to identify agent's destinations, where the former strategy converges slowly since all motion modes are derived from the same feature while the latter strategy has efficiency issue since its performance highly relies on the density of goal candidates. In this paper, we propose the Motion TRansformer (MTR) framework that models motion prediction as the joint optimization of global intention localization and local movement refinement. Instead of using goal candidates, MTR incorporates spatial intention priors by adopting a small set of learnable motion query pairs. Each motion query pair takes charge of trajectory prediction and refinement for a specific motion mode, which stabilizes the training process and facilitates better multimodal predictions. Experiments show that MTR achieves state-of-the-art performance on both the marginal and joint motion prediction challenges, ranking 1st on the leaderbaords of Waymo Open Motion Dataset. Code will be available at https://github.com/sshaoshuai/MTR.
[ Hall J ]
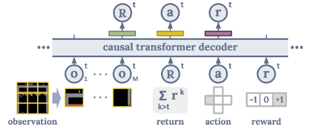
A longstanding goal of the field of AI is a method for learning a highly capable, generalist agent from diverse experience. In the subfields of vision and language, this was largely achieved by scaling up transformer-based models and training them on large, diverse datasets. Motivated by this progress, we investigate whether the same strategy can be used to produce generalist reinforcement learning agents. Specifically, we show that a single transformer-based model – with a single set of weights – trained purely offline can play a suite of up to 46 Atari games simultaneously at close-to-human performance. When trained and evaluated appropriately, we find that the same trends observed in language and vision hold, including scaling of performance with model size and rapid adaptation to new games via fine-tuning. We compare several approaches in this multi-game setting, such as online and offline RL methods and behavioral cloning, and find that our Multi-Game Decision Transformer models offer the best scalability and performance. We release the pre-trained models and code to encourage further research in this direction.
[ Hall J ]
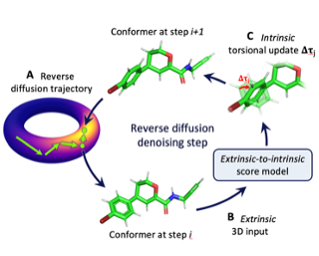
Molecular conformer generation is a fundamental task in computational chemistry. Several machine learning approaches have been developed, but none have outperformed state-of-the-art cheminformatics methods. We propose torsional diffusion, a novel diffusion framework that operates on the space of torsion angles via a diffusion process on the hypertorus and an extrinsic-to-intrinsic score model. On a standard benchmark of drug-like molecules, torsional diffusion generates superior conformer ensembles compared to machine learning and cheminformatics methods in terms of both RMSD and chemical properties, and is orders of magnitude faster than previous diffusion-based models. Moreover, our model provides exact likelihoods, which we employ to build the first generalizable Boltzmann generator. Code is available at https://github.com/gcorso/torsional-diffusion.
[ Hall J ]
[ Hall J ]
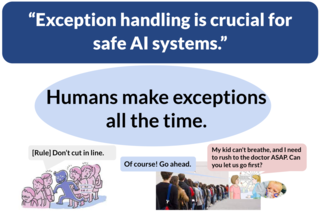
AI systems are becoming increasingly intertwined with human life. In order to effectively collaborate with humans and ensure safety, AI systems need to be able to understand, interpret and predict human moral judgments and decisions. Human moral judgments are often guided by rules, but not always. A central challenge for AI safety is capturing the flexibility of the human moral mind — the ability to determine when a rule should be broken, especially in novel or unusual situations. In this paper, we present a novel challenge set consisting of moral exception question answering (MoralExceptQA) of cases that involve potentially permissible moral exceptions – inspired by recent moral psychology studies. Using a state-of-the-art large language model (LLM) as a basis, we propose a novel moral chain of thought (MoralCoT) prompting strategy that combines the strengths of LLMs with theories of moral reasoning developed in cognitive science to predict human moral judgments. MoralCoT outperforms seven existing LLMs by 6.2% F1, suggesting that modeling human reasoning might be necessary to capture the flexibility of the human moral mind. We also conduct a detailed error analysis to suggest directions for future work to improve AI safety using MoralExceptQA. Our data is open-sourced at https://huggingface.co/datasets/feradauto/MoralExceptQA …
[ Hall J ]
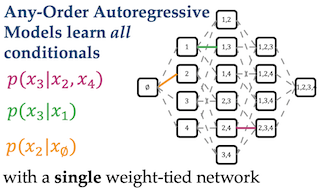
Conditional inference on arbitrary subsets of variables is a core problem in probabilistic inference with important applications such as masked language modeling and image inpainting. In recent years, the family of Any-Order Autoregressive Models (AO-ARMs) -- closely related to popular models such as BERT and XLNet -- has shown breakthrough performance in arbitrary conditional tasks across a sweeping range of domains. But, in spite of their success, in this paper we identify significant improvements to be made to previous formulations of AO-ARMs. First, we show that AO-ARMs suffer from redundancy in their probabilistic model, i.e., they define the same distribution in multiple different ways. We alleviate this redundancy by training on a smaller set of univariate conditionals that still maintains support for efficient arbitrary conditional inference. Second, we upweight the training loss for univariate conditionals that are evaluated more frequently during inference. Our method leads to improved performance with no compromises on tractability, giving state-of-the-art likelihoods in arbitrary conditional modeling on text (Text8), image (CIFAR10, ImageNet32), and continuous tabular data domains.
[ Hall J ]
We argue that the theory and practice of diffusion-based generative models are currently unnecessarily convoluted and seek to remedy the situation by presenting a design space that clearly separates the concrete design choices. This lets us identify several changes to both the sampling and training processes, as well as preconditioning of the score networks. Together, our improvements yield new state-of-the-art FID of 1.79 for CIFAR-10 in a class-conditional setting and 1.97 in an unconditional setting, with much faster sampling (35 network evaluations per image) than prior designs. To further demonstrate their modular nature, we show that our design changes dramatically improve both the efficiency and quality obtainable with pre-trained score networks from previous work, including improving the FID of a previously trained ImageNet-64 model from 2.07 to near-SOTA 1.55, and after re-training with our proposed improvements to a new SOTA of 1.36.
[ Hall J ]
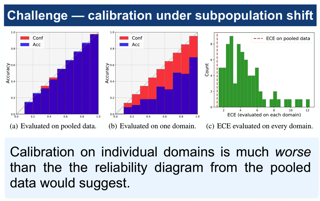
Uncertainty quantification is essential for the reliable deployment of machine learning models to high-stakes application domains. Uncertainty quantification is all the more challenging when training distribution and test distribution are different, even if the distribution shifts are mild. Despite the ubiquity of distribution shifts in real-world applications, existing uncertainty quantification approaches mainly study the in-distribution setting where the train and test distributions are the same. In this paper, we develop a systematic calibration model to handle distribution shifts by leveraging data from multiple domains. Our proposed method---multi-domain temperature scaling---uses the heterogeneity in the domains to improve calibration robustness under distribution shift. Through experiments on three benchmark data sets, we find our proposed method outperforms existing methods as measured on both in-distribution and out-of-distribution test sets.
[ Hall J ]
[ Hall J (level 1) ]
Abstract
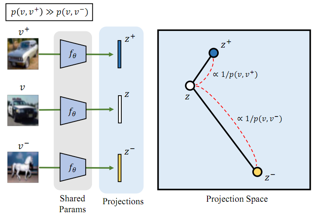
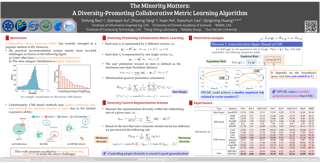
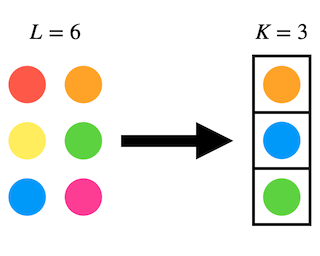
Collaborative Metric Learning (CML) has recently emerged as a popular method in recommendation systems (RS), closing the gap between metric learning and Collaborative Filtering. Following the convention of RS, existing methods exploit unique user representation in their model design. This paper focuses on a challenging scenario where a user has multiple categories of interests. Under this setting, we argue that the unique user representation might induce preference bias, especially when the item category distribution is imbalanced. To address this issue, we propose a novel method called Diversity-Promoting Collaborative Metric Learning (DPCML), with the hope of considering the commonly ignored minority interest of the user. The key idea behind DPCML is to include a multiple set of representations for each user in the system. Based on this embedding paradigm, user preference toward an item is aggregated from different embeddings by taking the minimum item-user distance among the user embedding set. Furthermore, we observe that the diversity of the embeddings for the same user also plays an essential role in the model. To this end, we propose a diversity control regularization term to accommodate the multi-vector representation strategy better. Theoretically, we show that DPCML could generalize well to unseen test data by …
[ Hall J ]
[ Hall J ]
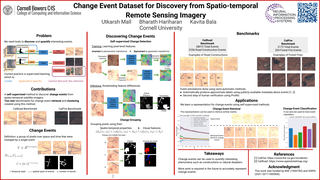
Satellite imagery is increasingly available, high resolution, and temporally detailed. Changes in spatio-temporal datasets such as satellite images are particularly interesting as they reveal the many events and forces that shape our world. However, finding such interesting and meaningful change events from the vast data is challenging. In this paper, we present new datasets for such change events that include semantically meaningful events like road construction. Instead of manually annotating the very large corpus of satellite images, we introduce a novel unsupervised approach that takes a large spatio-temporal dataset from satellite images and finds interesting change events. To evaluate the meaningfulness on these datasets we create 2 benchmarks namely CaiRoad and CalFire which capture the events of road construction and forest fires. These new benchmarks can be used to evaluate semantic retrieval/classification performance. We explore these benchmarks qualitatively and quantitatively by using several methods and show that these new datasets are indeed challenging for many existing methods.
[ Hall J ]
We consider experiments in dynamical systems where interventions on some experimental units impact other units through a limiting constraint (such as a limited supply of products). Despite outsize practical importance, the best estimators for this `Markovian' interference problem are largely heuristic in nature, and their bias is not well understood. We formalize the problem of inference in such experiments as one of policy evaluation. Off-policy estimators, while unbiased, apparently incur a large penalty in variance relative to state-of-the-art heuristics. We introduce an on-policy estimator: the Differences-In-Q's (DQ) estimator. We show that the DQ estimator can in general have exponentially smaller variance than off-policy evaluation. At the same time, its bias is second order in the impact of the intervention. This yields a striking bias-variance tradeoff so that the DQ estimator effectively dominates state-of-the-art alternatives. From a theoretical perspective, we introduce three separate novel techniques that are of independent interest in the theory of Reinforcement Learning (RL). Our empirical evaluation includes a set of experiments on a city-scale ride-hailing simulator.
[ Hall J ]

Probabilistic circuits (PCs) are a tractable representation of probability distributions allowing for exact and efficient computation of likelihoods and marginals. There has been significant recent progress on improving the scale and expressiveness of PCs. However, PC training performance plateaus as model size increases. We discover that most capacity in existing large PC structures is wasted: fully-connected parameter layers are only sparsely used. We propose two operations: pruning and growing, that exploit the sparsity of PC structures. Specifically, the pruning operation removes unimportant sub-networks of the PC for model compression and comes with theoretical guarantees. The growing operation increases model capacity by increasing the dimensions of latent states. By alternatingly applying pruning and growing, we increase the capacity that is meaningfully used, allowing us to significantly scale up PC learning. Empirically, our learner achieves state-of-the-art likelihoods on MNIST-family image datasets and an Penn Tree Bank language data compared to other PC learners and less tractable deep generative models such as flow-based models and variational autoencoders (VAEs).
[ Hall J ]
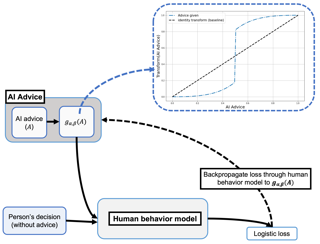
In many practical applications of AI, an AI model is used as a decision aid for human users. The AI provides advice that a human (sometimes) incorporates into their decision-making process. The AI advice is often presented with some measure of "confidence" that the human can use to calibrate how much they depend on or trust the advice. In this paper, we present an initial exploration that suggests showing AI models as more confident than they actually are, even when the original AI is well-calibrated, can improve human-AI performance (measured as the accuracy and confidence of the human's final prediction after seeing the AI advice). We first train a model to predict human incorporation of AI advice using data from thousands of human-AI interactions. This enables us to explicitly estimate how to transform the AI's prediction confidence, making the AI uncalibrated, in order to improve the final human prediction. We empirically validate our results across four different tasks---dealing with images, text and tabular data---involving hundreds of human participants. We further support our findings with simulation analysis. Our findings suggest the importance of jointly optimizing the human-AI system as opposed to the standard paradigm of optimizing the AI model alone.
[ Hall J ]

Randomly masking and predicting word tokens has been a successful approach in pre-training language models for a variety of downstream tasks. In this work, we observe that the same idea also applies naturally to sequential decision making, where many well-studied tasks like behavior cloning, offline RL, inverse dynamics, and waypoint conditioning correspond to different sequence maskings over a sequence of states, actions, and returns. We introduce the UniMASK framework, which provides a unified way to specify models which can be trained on many different sequential decision making tasks. We show that a single UniMASK model is often capable of carrying out many tasks with performance similar to or better than single-task models. Additionally, after fine-tuning, our UniMASK models consistently outperform comparable single-task models.
[ Hall J ]
This work identifies the existence and cause of a type of posterior collapse that frequently occurs in the Bayesian deep learning practice. For a general linear latent variable model that includes linear variational autoencoders as a special case, we precisely identify the nature of posterior collapse to be the competition between the likelihood and the regularization of the mean due to the prior. Our result also suggests that posterior collapse may be a general problem of learning for deeper architectures and deepens our understanding of Bayesian deep learning.
[ Hall J ]

Autonomous agents have made great strides in specialist domains like Atari games and Go. However, they typically learn tabula rasa in isolated environments with limited and manually conceived objectives, thus failing to generalize across a wide spectrum of tasks and capabilities. Inspired by how humans continually learn and adapt in the open world, we advocate a trinity of ingredients for building generalist agents: 1) an environment that supports a multitude of tasks and goals, 2) a large-scale database of multimodal knowledge, and 3) a flexible and scalable agent architecture. We introduce MineDojo, a new framework built on the popular Minecraft game that features a simulation suite with thousands of diverse open-ended tasks and an internet-scale knowledge base with Minecraft videos, tutorials, wiki pages, and forum discussions. Using MineDojo's data, we propose a novel agent learning algorithm that leverages large pre-trained video-language models as a learned reward function. Our agent is able to solve a variety of open-ended tasks specified in free-form language without any manually designed dense shaping reward. We open-source the simulation suite, knowledge bases, algorithm implementation, and pretrained models (https://minedojo.org) to promote research towards the goal of generally capable embodied agents.
[ Hall J ]
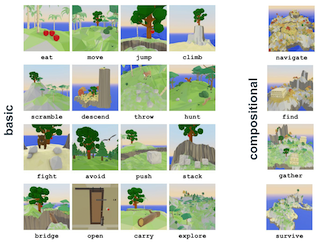
Despite impressive successes, deep reinforcement learning (RL) systems still fall short of human performance on generalization to new tasks and environments that differ from their training. As a benchmark tailored for studying RL generalization, we introduce Avalon, a set of tasks in which embodied agents in highly diverse procedural 3D worlds must survive by navigating terrain, hunting or gathering food, and avoiding hazards. Avalon is unique among existing RL benchmarks in that the reward function, world dynamics, and action space are the same for every task, with tasks differentiated solely by altering the environment; its 20 tasks, ranging in complexity from eat and throw to hunt and navigate, each create worlds in which the agent must perform specific skills in order to survive. This setup enables investigations of generalization within tasks, between tasks, and to compositional tasks that require combining skills learned from previous tasks. Avalon includes a highly efficient simulator, a library of baselines, and a benchmark with scoring metrics evaluated against hundreds of hours of human performance, all of which are open-source and publicly available. We find that standard RL baselines make progress on most tasks but are still far from human performance, suggesting Avalon is challenging enough …
[ Hall J ]
Cascading bandits is a natural and popular model that frames the task of learning to rank from Bernoulli click feedback in a bandit setting. For the case of unstructured rewards, we prove matching upper and lower bounds for the problem-independent (i.e., gap-free) regret, both of which strictly improve the best known. A key observation is that the hard instances of this problem are those with small mean rewards, i.e., the small click-through rates that are most relevant in practice. Based on this, and the fact that small mean implies small variance for Bernoullis, our key technical result shows that variance-aware confidence sets derived from the Bernstein and Chernoff bounds lead to optimal algorithms (up to log terms), whereas Hoeffding-based algorithms suffer order-wise suboptimal regret. This sharply contrasts with the standard (non-cascading) bandit setting, where the variance-aware algorithms only improve constants. In light of this and as an additional contribution, we propose a variance-aware algorithm for the structured case of linear rewards and show its regret strictly improves the state-of-the-art.
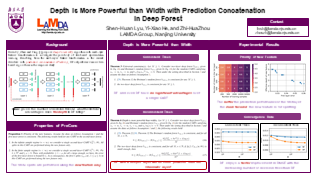
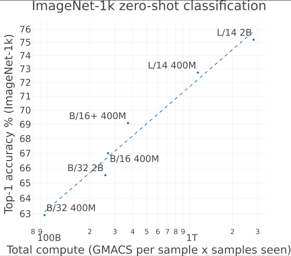
Large-scale vision-language pre-training has achieved promising results on downstream tasks. Existing methods highly rely on the assumption that the image-text pairs crawled from the Internet are in perfect one-to-one correspondence. However, in real scenarios, this assumption can be difficult to hold: the text description, obtained by crawling the affiliated metadata of the image, often suffers from the semantic mismatch and the mutual compatibility. To address these issues, we introduce PyramidCLIP, which constructs an input pyramid with different semantic levels for each modality, and aligns visual elements and linguistic elements in the form of hierarchy via peer-level semantics alignment and cross-level relation alignment. Furthermore, we soften the loss of negative samples (unpaired samples) so as to weaken the strict constraint during the pre-training stage, thus mitigating the risk of forcing the model to distinguish compatible negative pairs. Experiments on five downstream tasks demonstrate the effectiveness of the proposed PyramidCLIP. In particular, with the same amount of 15 million pre-training image-text pairs, PyramidCLIP exceeds CLIP on ImageNet zero-shot classification top-1 accuracy by 10.6%/13.2%/10.0% with ResNet50/ViT-B32/ViT-B16 based image encoder respectively. When scaling to larger datasets, PyramidCLIP achieves the state-of-the-art results on several downstream tasks. In particular, the results of PyramidCLIP-ResNet50 trained on 143M …
[ Hall J ]
Decision trees are well-known due to their ease of interpretability.To improve accuracy, we need to grow deep trees or ensembles of trees.These are hard to interpret, offsetting their original benefits. Shapley values have recently become a popular way to explain the predictions of tree-based machine learning models. It provides a linear weighting to features independent of the tree structure. The rise in popularity is mainly due to TreeShap, which solves a general exponential complexity problem in polynomial time. Following extensive adoption in the industry, more efficient algorithms are required. This paper presents a more efficient and straightforward algorithm: Linear TreeShap.Like TreeShap, Linear TreeShap is exact and requires the same amount of memory.
[ Hall J ]
Large-scale language models often learn behaviors that are misaligned with user expectations. Generated text may contain offensive or toxic language, contain significant repetition, or be of a different sentiment than desired by the user. We consider the task of unlearning these misalignments by fine-tuning the language model on signals of what not to do. We introduce Quantized Reward Konditioning (Quark), an algorithm for optimizing a reward function that quantifies an (un)wanted property, while not straying too far from the original model. Quark alternates between (i) collecting samples with the current language model, (ii) sorting them into quantiles based on reward, with each quantile identified by a reward token prepended to the language model’s input, and (iii) using a standard language modeling loss on samples from each quantile conditioned on its reward token, while remaining nearby the original language model via a KL-divergence penalty. By conditioning on a high-reward token at generation time, the model generates text that exhibits less of the unwanted property. For unlearning toxicity, negative sentiment, and repetition, our experiments show that Quark outperforms both strong baselines and state-of-the-art reinforcement learning methods like PPO, while relying only on standard language modeling primitives.
[ Hall J ]
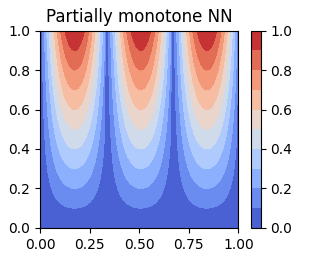
Partially monotone regression is a regression analysis in which the target values are monotonically increasing with respect to a subset of input features. The TensorFlow Lattice library is one of the standard machine learning libraries for partially monotone regression. It consists of several neural network layers, and its core component is the lattice layer. One of the problems of the lattice layer is that it requires the projected gradient descent algorithm with many constraints to train it. Another problem is that it cannot receive a high-dimensional input vector due to the memory consumption. We propose a novel neural network layer, the hierarchical lattice layer (HLL), as an extension of the lattice layer so that we can use a standard stochastic gradient descent algorithm to train HLL while satisfying monotonicity constraints and so that it can receive a high-dimensional input vector. Our experiments demonstrate that HLL did not sacrifice its prediction performance on real datasets compared with the lattice layer.
[ Hall J ]
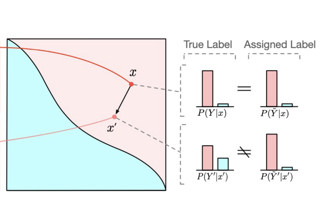
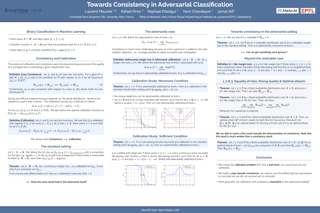
We show that label noise exists in adversarial training. Such label noise is due to the mismatch between the true label distribution of adversarial examples and the label inherited from clean examples – the true label distribution is distorted by the adversarial perturbation, but is neglected by the common practice that inherits labels from clean examples. Recognizing label noise sheds insights on the prevalence of robust overfitting in adversarial training, and explains its intriguing dependence on perturbation radius and data quality. Also, our label noise perspective aligns well with our observations of the epoch-wise double descent in adversarial training. Guided by our analyses, we proposed a method to automatically calibrate the label to address the label noise and robust overfitting. Our method achieves consistent performance improvements across various models and datasets without introducing new hyper-parameters or additional tuning.
[ Hall J ]
Web-crawled datasets have enabled remarkable generalization capabilities in recent image-text models such as CLIP (Contrastive Language-Image pre-training) or Flamingo, but little is known about the dataset creation processes. In this work, we introduce a testbed of six publicly available data sources---YFCC, LAION, Conceptual Captions, WIT, RedCaps, Shutterstock---to investigate how pre-training distributions induce robustness in CLIP. We find that the performance of the pre-training data varies substantially across distribution shifts, with no single data source dominating. Moreover, we systematically study the interactions between these data sources and find that mixing multiple sources does not necessarily yield better models, but rather dilutes the robustness of the best individual data source. We complement our empirical findings with theoretical insights from a simple setting, where combining the training data also results in diluted robustness. In addition, our theoretical model provides a candidate explanation for the success of the CLIP-based data filtering technique recently employed in the LAION dataset. Overall our results demonstrate that simply gathering a large amount of data from the web is not the most effective way to build a pre-training dataset for robust generalization, necessitating further study into dataset design. Code is available at https://github.com/mlfoundations/clipqualitynot_quantity.
[ Hall J ]
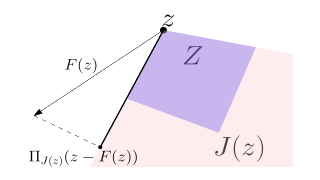
Optimal experimental design seeks to determine the most informative allocation of experiments to infer an unknown statistical quantity. In this work, we investigate optimal design of experiments for {\em estimation of linear functionals in reproducing kernel Hilbert spaces (RKHSs)}. This problem has been extensively studied in the linear regression setting under an estimability condition, which allows estimating parameters without bias. We generalize this framework to RKHSs, and allow for the linear functional to be only approximately inferred, i.e., with a fixed bias. This scenario captures many important modern applications such as estimation of gradient maps, integrals and solutions to differential equations. We provide algorithms for constructing bias-aware designs for linear functionals. We derive non-asymptotic confidence sets for fixed and adaptive designs under sub-Gaussian noise, enabling us to certify estimation with bounded error with high probability.
[ Hall J ]
Many high-dimensional statistical inference problems are believed to possess inherent computational hardness. Various frameworks have been proposed to give rigorous evidence for such hardness, including lower bounds against restricted models of computation (such as low-degree functions), as well as methods rooted in statistical physics that are based on free energy landscapes. This paper aims to make a rigorous connection between the seemingly different low-degree and free-energy based approaches. We define a free-energy based criterion for hardness and formally connect it to the well-established notion of low-degree hardness for a broad class of statistical problems, namely all Gaussian additive models and certain models with a sparse planted signal. By leveraging these rigorous connections we are able to: establish that for Gaussian additive models the "algebraic" notion of low-degree hardness implies failure of "geometric" local MCMC algorithms, and provide new low-degree lower bounds for sparse linear regression which seem difficult to prove directly. These results provide both conceptual insights into the connections between different notions of hardness, as well as concrete technical tools such as new methods for proving low-degree lower bounds.
Most knowledge graphs (KGs) are incomplete, which motivates one important research topic on automatically complementing knowledge graphs. However, evaluation of knowledge graph completion (KGC) models often ignores the incompleteness---facts in the test set are ranked against all unknown triplets which may contain a large number of missing facts not included in the KG yet. Treating all unknown triplets as false is called the closed-world assumption. This closed-world assumption might negatively affect the fairness and consistency of the evaluation metrics. In this paper, we study KGC evaluation under a more realistic setting, namely the open-world assumption, where unknown triplets are considered to include many missing facts not included in the training or test sets. For the currently most used metrics such as mean reciprocal rank (MRR) and Hits@K, we point out that their behavior may be unexpected under the open-world assumption. Specifically, with not many missing facts, their numbers show a logarithmic trend with respect to the true strength of the model, and thus, the metric increase could be insignificant in terms of reflecting the true model improvement. Further, considering the variance, we show that the degradation in the reported numbers may result in incorrect comparisons between different models, where stronger …
[ Hall J ]
The new generation of state-of-the-art computer vision systems are trained from natural language supervision, ranging from simple object category names to descriptive captions. This form of supervision ensures high generality and usability of the learned visual models, based on the broad concept coverage achieved through large-scale data collection process. Alternatively, we argue that learning with external knowledge about images is a promising way which leverages a much more structured source of supervision and offers sample efficiency. In this paper, we propose K-LITE (Knowledge-augmented Language-Image Training and Evaluation), a simple strategy to leverage external knowledge for building transferable visual systems: In training, it enriches entities in natural language with WordNet and Wiktionary knowledge, leading to an efficient and scalable approach to learning image representations that uses knowledge about the visual concepts; In evaluation, the natural language is also augmented with external knowledge and then used to reference learned visual concepts (or describe new ones) to enable zero-shot and few-shot transfer of the pre-trained models. We study the performance of K-LITE on two important computer vision problems, image classification and object detection, benchmarking on 20 and 13 different existing datasets, respectively. The proposed knowledge-augmented models show significant improvement in transfer learning performance …
[ Hall J ]
Building models that can be rapidly adapted to novel tasks using only a handful of annotated examples is an open challenge for multimodal machine learning research. We introduce Flamingo, a family of Visual Language Models (VLM) with this ability. We propose key architectural innovations to: (i) bridge powerful pretrained vision-only and language-only models, (ii) handle sequences of arbitrarily interleaved visual and textual data, and (iii) seamlessly ingest images or videos as inputs. Thanks to their flexibility, Flamingo models can be trained on large-scale multimodal web corpora containing arbitrarily interleaved text and images, which is key to endow them with in-context few-shot learning capabilities. We perform a thorough evaluation of our models, exploring and measuring their ability to rapidly adapt to a variety of image and video tasks. These include open-ended tasks such as visual question-answering, where the model is prompted with a question which it has to answer, captioning tasks, which evaluate the ability to describe a scene or an event, and close-ended tasks such as multiple-choice visual question-answering. For tasks lying anywhere on this spectrum, a single Flamingo model can achieve a new state of the art with few-shot learning, simply by prompting the model with task-specific examples. On …
[ Hall J ]
There are over 300 sign languages in the world, many of which have very limited or no labelled sign-to-text datasets. To address low-resource data scenarios, self-supervised pretraining and multilingual finetuning have been shown to be effective in natural language and speech processing. In this work, we apply these ideas to sign language recognition.We make three contributions.- First, we release SignCorpus, a large pretraining dataset on sign languages comprising about 4.6K hours of signing data across 10 sign languages. SignCorpus is curated from sign language videos on the internet, filtered for data quality, and converted into sequences of pose keypoints thereby removing all personal identifiable information (PII).- Second, we release Sign2Vec, a graph-based model with 5.2M parameters that is pretrained on SignCorpus. We envisage Sign2Vec as a multilingual large-scale pretrained model which can be fine-tuned for various sign recognition tasks across languages.- Third, we create MultiSign-ISLR -- a multilingual and label-aligned dataset of sequences of pose keypoints from 11 labelled datasets across 7 sign languages, and MultiSign-FS -- a new finger-spelling training and test set across 7 languages. On these datasets, we fine-tune Sign2Vec to create multilingual isolated sign recognition models. With experiments on multiple benchmarks, we show that pretraining and …
[ Hall J ]
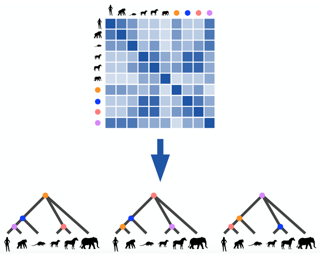
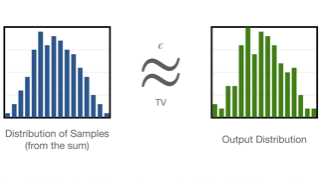
Phylogenetics is a classical methodology in computational biology that today has become highly relevant for medical investigation of single-cell data, e.g., in the context of development of cancer. The exponential size of the tree space is unfortunately a formidable obstacle for current Bayesian phylogenetic inference using Markov chain Monte Carlo based methods since these rely on local operations. And although more recent variational inference (VI) based methods offer speed improvements, they rely on expensive auto-differentiation operations for learning the variational parameters. We propose VaiPhy, a remarkably fast VI based algorithm for approximate posterior inference in an \textit{augmented tree space}. VaiPhy produces marginal log-likelihood estimates on par with the state-of-the-art methods on real data, and is considerably faster since it does not require auto-differentiation. Instead, VaiPhy combines coordinate ascent update equations with two novel sampling schemes: (i) \textit{SLANTIS}, a proposal distribution for tree topologies in the augmented tree space, and (ii) the \textit{JC sampler}, the, to the best of our knowledge, first ever scheme for sampling branch lengths directly from the popular Jukes-Cantor model. We compare VaiPhy in terms of density estimation and runtime. Additionally, we evaluate the reproducibility of the baselines. We provide our code on GitHub: \url{https://github.com/Lagergren-Lab/VaiPhy}.
We study the scaling limits of stochastic gradient descent (SGD) with constant step-size in the high-dimensional regime. We prove limit theorems for the trajectories of summary statistics (i.e., finite-dimensional functions) of SGD as the dimension goes to infinity. Our approach allows one to choose the summary statistics that are tracked, the initialization, and the step-size. It yields both ballistic (ODE) and diffusive (SDE) limits, with the limit depending dramatically on the former choices. We find a critical scaling regime for the step-size below which this ``effective dynamics" matches gradient flow for the population loss, but at which, a new correction term appears which changes the phase diagram. About the fixed points of this effective dynamics, the corresponding diffusive limits can be quite complex and even degenerate. We demonstrate our approach on popular examples including estimation for spiked matrix and tensor models and classification via two-layer networks for binary and XOR-type Gaussian mixture models. These examples exhibit surprising phenomena including multimodal timescales to convergence as well as convergence to sub-optimal solutions with probability bounded away from zero from random (e.g., Gaussian) initializations.
[ Hall J ]
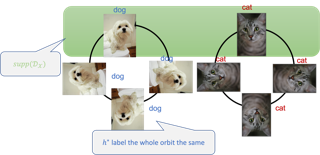
Transformation invariances are present in many real-world problems. For example, image classification is usually invariant to rotation and color transformation: a rotated car in a different color is still identified as a car. Data augmentation, which adds the transformed data into the training set and trains a model on the augmented data, is one commonly used technique to build these invariances into the learning process. However, it is unclear how data augmentation performs theoretically and what the optimal algorithm is in presence of transformation invariances. In this paper, we study PAC learnability under transformation invariances in three settings according to different levels of realizability: (i) A hypothesis fits the augmented data; (ii) A hypothesis fits only the original data and the transformed data lying in the support of the data distribution; (iii) Agnostic case. One interesting observation is that distinguishing between the original data and the transformed data is necessary to achieve optimal accuracy in setting (ii) and (iii), which implies that any algorithm not differentiating between the original and transformed data (including data augmentation) is not optimal. Furthermore, this type of algorithms can even ``harm'' the accuracy. In setting (i), although it is unnecessary to distinguish between the two …
[ Hall J ]
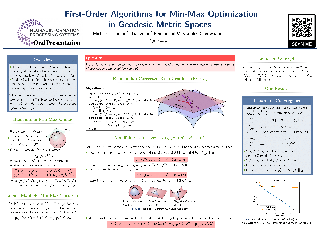
From optimal transport to robust dimensionality reduction, many machine learning applicationscan be cast into the min-max optimization problems over Riemannian manifolds. Though manymin-max algorithms have been analyzed in the Euclidean setting, it has been elusive how theseresults translate to the Riemannian case. Zhang et al. (2022) have recently identified that geodesic convexconcave Riemannian problems admit always Sion’s saddle point solutions. Immediately, an importantquestion that arises is if a performance gap between the Riemannian and the optimal Euclidean spaceconvex concave algorithms is necessary. Our work is the first to answer the question in the negative:We prove that the Riemannian corrected extragradient (RCEG) method achieves last-iterate at alinear convergence rate at the geodesically strongly convex concave case, matching the euclidean one.Our results also extend to the stochastic or non-smooth case where RCEG & Riemanian gradientascent descent (RGDA) achieve respectively near-optimal convergence rates up to factors dependingon curvature of the manifold. Finally, we empirically demonstrate the effectiveness of RCEG insolving robust PCA.
[ Hall J ]
[ Hall J ]
[ Hall J ]
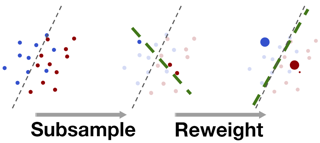
A Bayesian coreset is a small, weighted subset of data that replaces the full dataset during Bayesian inference, with the goal of reducing computational cost. Although past work has shown empirically that there often exists a coreset with low inferential error, efficiently constructing such a coreset remains a challenge. Current methods tend to be slow, require a secondary inference step after coreset construction, and do not provide bounds on the data marginal evidence. In this work, we introduce a new method---sparse Hamiltonian flows---that addresses all three of these challenges. The method involves first subsampling the data uniformly, and then optimizing a Hamiltonian flow parametrized by coreset weights and including periodic momentum quasi-refreshment steps. Theoretical results show that the method enables an exponential compression of the dataset in a representative model, and that the quasi-refreshment steps reduce the KL divergence to the target. Real and synthetic experiments demonstrate that sparse Hamiltonian flows provide accurate posterior approximations with significantly reduced runtime compared with competing dynamical-system-based inference methods.
[ Hall J ]
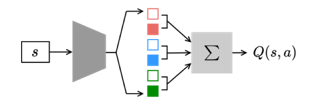
Many reinforcement learning (RL) applications have combinatorial action spaces, where each action is a composition of sub-actions. A standard RL approach ignores this inherent factorization structure, resulting in a potential failure to make meaningful inferences about rarely observed sub-action combinations; this is particularly problematic for offline settings, where data may be limited. In this work, we propose a form of linear Q-function decomposition induced by factored action spaces. We study the theoretical properties of our approach, identifying scenarios where it is guaranteed to lead to zero bias when used to approximate the Q-function. Outside the regimes with theoretical guarantees, we show that our approach can still be useful because it leads to better sample efficiency without necessarily sacrificing policy optimality, allowing us to achieve a better bias-variance trade-off. Across several offline RL problems using simulators and real-world datasets motivated by healthcare, we demonstrate that incorporating factored action spaces into value-based RL can result in better-performing policies. Our approach can help an agent make more accurate inferences within underexplored regions of the state-action space when applying RL to observational datasets.
[ Hall J ]
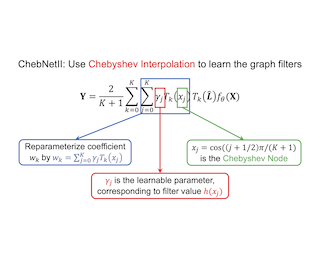
Designing spectral convolutional networks is a challenging problem in graph learning. ChebNet, one of the early attempts, approximates the spectral graph convolutions using Chebyshev polynomials. GCN simplifies ChebNet by utilizing only the first two Chebyshev polynomials while still outperforming it on real-world datasets. GPR-GNN and BernNet demonstrate that the Monomial and Bernstein bases also outperform the Chebyshev basis in terms of learning the spectral graph convolutions. Such conclusions are counter-intuitive in the field of approximation theory, where it is established that the Chebyshev polynomial achieves the optimum convergent rate for approximating a function. In this paper, we revisit the problem of approximating the spectral graph convolutions with Chebyshev polynomials. We show that ChebNet's inferior performance is primarily due to illegal coefficients learnt by ChebNet approximating analytic filter functions, which leads to over-fitting. We then propose ChebNetII, a new GNN model based on Chebyshev interpolation, which enhances the original Chebyshev polynomial approximation while reducing the Runge phenomenon. We conducted an extensive experimental study to demonstrate that ChebNetII can learn arbitrary graph convolutions and achieve superior performance in both full- and semi-supervised node classification tasks. Most notably, we scale ChebNetII to a billion graph ogbn-papers100M, showing that spectral-based GNNs have superior performance. …
[ Hall J ]
We study sequential general online regression, known also as sequential probability assignments, under logarithmic loss when compared against a broad class of experts. We obtain tight, often matching, lower and upper bounds for sequential minimax regret, which is defined as the excess loss incurred by the predictor over the best expert in the class. After proving a general upper bound we consider some specific classes of experts from Lipschitz class to bounded Hessian class and derive matching lower and upper bounds with provably optimal constants. Our bounds work for a wide range of values of the data dimension and the number of rounds. To derive lower bounds, we use tools from information theory (e.g., Shtarkov sum) and for upper bounds, we resort to new "smooth truncated covering" of the class of experts. This allows us to find constructive proofs by applying a simple and novel truncated Bayesian algorithm. Our proofs are substantially simpler than the existing ones and yet provide tighter (and often optimal) bounds.
[ Hall J ]
Local optimization presents a promising approach to expensive, high-dimensional black-box optimization by sidestepping the need to globally explore the search space. For objective functions whose gradient cannot be evaluated directly, Bayesian optimization offers one solution -- we construct a probabilistic model of the objective, design a policy to learn about the gradient at the current location, and use the resulting information to navigate the objective landscape. Previous work has realized this scheme by minimizing the variance in the estimate of the gradient, then moving in the direction of the expected gradient. In this paper, we re-examine and refine this approach. We demonstrate that, surprisingly, the expected value of the gradient is not always the direction maximizing the probability of descent, and in fact, these directions may be nearly orthogonal. This observation then inspires an elegant optimization scheme seeking to maximize the probability of descent while moving in the direction of most-probable descent. Experiments on both synthetic and real-world objectives show that our method outperforms previous realizations of this optimization scheme and is competitive against other, significantly more complicated baselines.
[ Hall J ]
[ Hall J ]
We explore how generating a chain of thought---a series of intermediate reasoning steps---significantly improves the ability of large language models to perform complex reasoning. In particular, we show how such reasoning abilities emerge naturally in sufficiently large language models via a simple method called chain of thought prompting, where a few chain of thought demonstrations are provided as exemplars in prompting. Experiments on three large language models show that chain of thought prompting improves performance on a range of arithmetic, commonsense, and symbolic reasoning tasks. The empirical gains can be striking. For instance, prompting a 540B-parameter language model with just eight chain of thought exemplars achieves state of the art accuracy on the GSM8K benchmark of math word problems, surpassing even finetuned GPT-3 with a verifier.
[ Hall J ]
[ Hall J ]
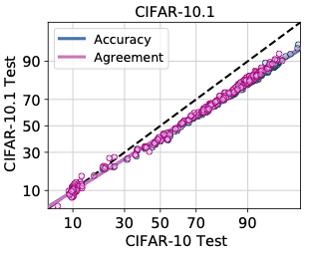
Recently, Miller et al. showed that a model's in-distribution (ID) accuracy has a strong linear correlation with its out-of-distribution (OOD) accuracy, on several OOD benchmarks, a phenomenon they dubbed ``accuracy-on-the-line''. While a useful tool for model selection (i.e., the model most likely to perform the best OOD is the one with highest ID accuracy), this fact does not help to estimate the actual OOD performance of models without access to a labeled OOD validation set. In this paper, we show a similar surprising phenomena also holds for the agreement between pairs of neural network classifiers: whenever accuracy-on-the-line holds, we observe that the OOD agreement between the predictions of any two pairs of neural networks (with potentially different architectures) also observes a strong linear correlation with their ID agreement. Furthermore, we observe that the slope and bias of OOD vs ID agreement closely matches that of OOD vs ID accuracy. This phenomenon which we call agreement-on-the-line, has important practical applications: without any labeled data, we can predict the OOD accuracy of classifiers, since OOD agreement can be estimated with just unlabeled data. Our prediction algorithm outperforms previous methods both in shifts where agreement-on-the-line holds and, surprisingly, when accuracy is not on …
[ Hall J ]
The ability to extrapolate from short problem instances to longer ones is an important form of out-of-distribution generalization in reasoning tasks, and is crucial when learning from datasets where longer problem instances are rare. These include theorem proving, solving quantitative mathematics problems, and reading/summarizing novels. In this paper, we run careful empirical studies exploring the length generalization capabilities of transformer-based language models. We first establish that naively finetuning transformers on length generalization tasks shows significant generalization deficiencies independent of model scale. We then show that combining pretrained large language models' in-context learning abilities with scratchpad prompting (asking the model to output solution steps before producing an answer) results in a dramatic improvement in length generalization. We run careful failure analyses on each of the learning modalities and identify common sources of mistakes that highlight opportunities in equipping language models with the ability to generalize to longer problems.
[ Hall J ]
[ Hall J ]
We aim to understand grokking, a phenomenon where models generalize long after overfitting their training set. We present both a microscopic analysis anchored by an effective theory and a macroscopic analysis of phase diagrams describing learning performance across hyperparameters. We find that generalization originates from structured representations, whose training dynamics and dependence on training set size can be predicted by our effective theory (in a toy setting). We observe empirically the presence of four learning phases: comprehension, grokking, memorization, and confusion. We find representation learning to occur only in a "Goldilocks zone" (including comprehension and grokking) between memorization and confusion. Compared to the comprehension phase, the grokking phase stays closer to the memorization phase, leading to delayed generalization. The Goldilocks phase is reminiscent of "intelligence from starvation" in Darwinian evolution, where resource limitations drive discovery of more efficient solutions. This study not only provides intuitive explanations of the origin of grokking, but also highlights the usefulness of physics-inspired tools, e.g., effective theories and phase diagrams, for understanding deep learning.
[ Hall J ]
Groundbreaking language-vision architectures like CLIP and DALL-E proved the utility of training on large amounts of noisy image-text data, without relying on expensive accurate labels used in standard vision unimodal supervised learning. The resulting models showed capabilities of strong text-guided image generation and transfer to downstream tasks, while performing remarkably at zero-shot classification with noteworthy out-of-distribution robustness. Since then, large-scale language-vision models like ALIGN, BASIC, GLIDE, Flamingo and Imagen made further improvements. Studying the training and capabilities of such models requires datasets containing billions of image-text pairs. Until now, no datasets of this size have been made openly available for the broader research community. To address this problem and democratize research on large-scale multi-modal models, we present LAION-5B - a dataset consisting of 5.85 billion CLIP-filtered image-text pairs, of which 2.32B contain English language. We show successful replication and fine-tuning of foundational models like CLIP, GLIDE and Stable Diffusion using the dataset, and discuss further experiments enabled with an openly available dataset of this scale. Additionally we provide several nearest neighbor indices, an improved web-interface for dataset exploration and subset generation, and detection scores for watermark, NSFW, and toxic content detection.
[ Hall J ]
Despite their wide adoption, the underlying training and memorization dynamics of very large language models is not well understood. We empirically study exact memorization in causal and masked language modeling, across model sizes and throughout the training process. We measure the effects of dataset size, learning rate, and model size on memorization, finding that larger language models memorize training data faster across all settings. Surprisingly, we show that larger models can memorize a larger portion of the data before over-fitting and tend to forget less throughout the training process. We also analyze the memorization dynamics of different parts of speech and find that models memorize nouns and numbers first; we hypothesize and provide empirical evidence that nouns and numbers act as a unique identifier for memorizing individual training examples. Together, these findings present another piece of the broader puzzle of trying to understand what actually improves as models get bigger.
[ Hall J ]
[ Hall J ]
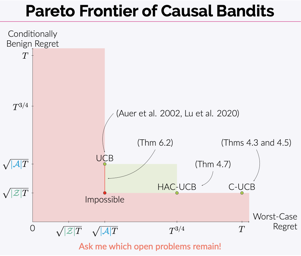
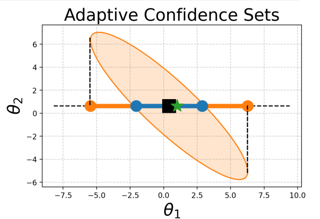
Multi-armed bandit problems provide a framework to identify the optimal intervention over a sequence of repeated experiments. Without additional assumptions, minimax optimal performance (measured by cumulative regret) is well-understood. With access to additional observed variables that d-separate the intervention from the outcome (i.e., they are a d-separator), recent "causal bandit" algorithms provably incur less regret. However, in practice it is desirable to be agnostic to whether observed variables are a d-separator. Ideally, an algorithm should be adaptive; that is, perform nearly as well as an algorithm with oracle knowledge of the presence or absence of a d-separator. In this work, we formalize and study this notion of adaptivity, and provide a novel algorithm that simultaneously achieves (a) optimal regret when a d-separator is observed, improving on classical minimax algorithms, and (b) significantly smaller regret than recent causal bandit algorithms when the observed variables are not a d-separator. Crucially, our algorithm does not require any oracle knowledge of whether a d-separator is observed. We also generalize this adaptivity to other conditions, such as the front-door criterion.
[ Hall J ]

Attention mechanisms have become a standard tool for sequence modeling tasks, in particular by stacking self-attention layers over the entire input sequence as in the Transformer architecture. In this work we introduce a novel attention procedure called staircase attention that, unlike self-attention, operates across the sequence (in time) recurrently processing the input by adding another step of processing. A step in the staircase comprises of backward tokens (encoding the sequence so far seen) and forward tokens (ingesting a new part of the sequence). Thus our model can trade off performance and compute, by increasing the amount of recurrence through time and depth. Staircase attention is shown to be able to solve tasks that involve tracking that conventional Transformers cannot, due to this recurrence. Further, it is shown to provide improved modeling power for the same size model (number of parameters) compared to self-attentive Transformers on large language modeling and dialogue tasks, yielding significant perplexity gains.
[ Hall J ]
Recent advances in contrastive representation learning over paired image-text data have led to models such as CLIP that achieve state-of-the-art performance for zero-shot classification and distributional robustness. Such models typically require joint reasoning in the image and text representation spaces for downstream inference tasks. Contrary to prior beliefs, we demonstrate that the image and text representations learned via a standard contrastive objective are not interchangeable and can lead to inconsistent downstream predictions. To mitigate this issue, we formalize consistency and propose CyCLIP, a framework for contrastive representation learning that explicitly optimizes for the learned representations to be geometrically consistent in the image and text space. In particular, we show that consistent representations can be learned by explicitly symmetrizing (a) the similarity between the two mismatched image-text pairs (cross-modal consistency); and (b) the similarity between the image-image pair and the text-text pair (in-modal consistency). Empirically, we show that the improved consistency in CyCLIP translates to significant gains over CLIP, with gains ranging from 10%-24% for zero-shot classification on standard benchmarks (CIFAR-10, CIFAR-100, ImageNet1K) and 10%-27% for robustness to various natural distribution shifts.
[ Hall J ]
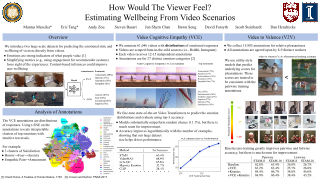
In recent years, deep neural networks have demonstrated increasingly strong abilities to recognize objects and activities in videos. However, as video understanding becomes widely used in real-world applications, a key consideration is developing human-centric systems that understand not only the content of the video but also how it would affect the wellbeing and emotional state of viewers. To facilitate research in this setting, we introduce two large-scale datasets with over 60,000 videos manually annotated for emotional response and subjective wellbeing. The Video Cognitive Empathy (VCE) dataset contains annotations for distributions of fine-grained emotional responses, allowing models to gain a detailed understanding of affective states. The Video to Valence (V2V) dataset contains annotations of relative pleasantness between videos, which enables predicting a continuous spectrum of wellbeing. In experiments, we show how video models that are primarily trained to recognize actions and find contours of objects can be repurposed to understand human preferences and the emotional content of videos. Although there is room for improvement, predicting wellbeing and emotional response is on the horizon for state-of-the-art models. We hope our datasets can help foster further advances at the intersection of commonsense video understanding and human preference learning.
[ Hall J ]
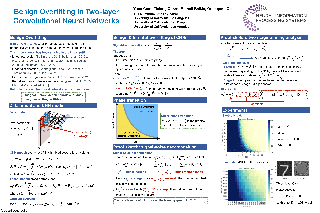
Modern neural networks often have great expressive power and can be trained to overfit the training data, while still achieving a good test performance. This phenomenon is referred to as “benign overfitting”. Recently, there emerges a line of works studying “benign overfitting” from the theoretical perspective. However, they are limited to linear models or kernel/random feature models, and there is still a lack of theoretical understanding about when and how benign overfitting occurs in neural networks. In this paper, we study the benign overfitting phenomenon in training a two-layer convolutional neural network (CNN). We show that when the signal-to-noise ratio satisfies a certain condition, a two-layer CNN trained by gradient descent can achieve arbitrarily small training and test loss. On the other hand, when this condition does not hold, overfitting becomes harmful and the obtained CNN can only achieve a constant level test loss. These together demonstrate a sharp phase transition between benign overfitting and harmful overfitting, driven by the signal-to-noise ratio. To the best of our knowledge, this is the first work that precisely characterizes the conditions under which benign overfitting can occur in training convolutional neural networks.
[ Hall J ]
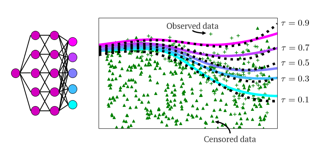
This paper considers doing quantile regression on censored data using neural networks (NNs). This adds to the survival analysis toolkit by allowing direct prediction of the target variable, along with a distribution-free characterisation of uncertainty, using a flexible function approximator. We begin by showing how an algorithm popular in linear models can be applied to NNs. However, the resulting procedure is inefficient, requiring sequential optimisation of an individual NN at each desired quantile. Our major contribution is a novel algorithm that simultaneously optimises a grid of quantiles output by a single NN. To offer theoretical insight into our algorithm, we show firstly that it can be interpreted as a form of expectation-maximisation, and secondly that it exhibits a desirable `self-correcting' property. Experimentally, the algorithm produces quantiles that are better calibrated than existing methods on 10 out of 12 real datasets.
[ Hall J ]
In this paper, we study the gyrovector space structure (gyro-structure) of matrix manifolds. Our work is motivated by the success of hyperbolic neural networks (HNNs) that have demonstrated impressive performance in a variety of applications. At the heart of HNNs is the theory of gyrovector spaces that provides a powerful tool for studying hyperbolic geometry. Here we focus on two matrix manifolds, i.e., Symmetric Positive Definite (SPD) and Grassmann manifolds, and consider connecting the Riemannian geometry of these manifolds with the basic operations, i.e., the binary operation and scalar multiplication on gyrovector spaces. Our work reveals some interesting facts about SPD and Grassmann manifolds. First, SPD matrices with an Affine-Invariant (AI) or a Log-Euclidean (LE) geometry have rich structure with strong connection to hyperbolic geometry. Second, linear subspaces, when equipped with our proposed basic operations, form what we call gyrocommutative and gyrononreductive gyrogroups. Furthermore, they share remarkable analogies with gyrovector spaces. We demonstrate the applicability of our approach for human activity understanding and question answering.
[ Hall J ]
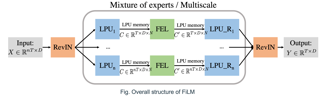
Recent studies have shown that deep learning models such as RNNs and Transformers have brought significant performance gains for long-term forecasting of time series because they effectively utilize historical information. We found, however, that there is still great room for improvement in how to preserve historical information in neural networks while avoiding overfitting to noise present in the history. Addressing this allows better utilization of the capabilities of deep learning models. To this end, we design a Frequency improved Legendre Memory model, or FiLM: it applies Legendre polynomial projections to approximate historical information, uses Fourier projection to remove noise, and adds a low-rank approximation to speed up computation. Our empirical studies show that the proposed FiLM significantly improves the accuracy of state-of-the-art models in multivariate and univariate long-term forecasting by (19.2%, 22.6%), respectively. We also demonstrate that the representation module developed in this work can be used as a general plugin to improve the long-term prediction performance of other deep learning modules. Code is available at https://github.com/tianzhou2011/FiLM/.
[ Hall J ]
[ Hall J ]
[ Hall J ]
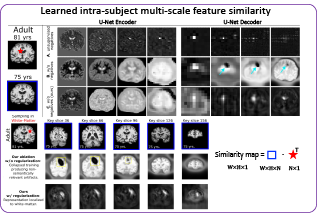
Recent self-supervised advances in medical computer vision exploit the global and local anatomical self-similarity for pretraining prior to downstream tasks such as segmentation. However, current methods assume i.i.d. image acquisition, which is invalid in clinical study designs where follow-up longitudinal scans track subject-specific temporal changes. Further, existing self-supervised methods for medically-relevant image-to-image architectures exploit only spatial or temporal self-similarity and do so via a loss applied only at a single image-scale, with naive multi-scale spatiotemporal extensions collapsing to degenerate solutions. To these ends, this paper makes two contributions: (1) It presents a local and multi-scale spatiotemporal representation learning method for image-to-image architectures trained on longitudinal images. It exploits the spatiotemporal self-similarity of learned multi-scale intra-subject image features for pretraining and develops several feature-wise regularizations that avoid degenerate representations; (2) During finetuning, it proposes a surprisingly simple self-supervised segmentation consistency regularization to exploit intra-subject correlation. Benchmarked across various segmentation tasks, the proposed framework outperforms both well-tuned randomly-initialized baselines and current self-supervised techniques designed for both i.i.d. and longitudinal datasets. These improvements are demonstrated across both longitudinal neurodegenerative adult MRI and developing infant brain MRI and yield both higher performance and longitudinal consistency.
[ Hall J ]
Knowledge-intensive language tasks require NLP systems to both provide the correct answer and retrieve supporting evidence for it in a given corpus. Autoregressive language models are emerging as the de-facto standard for generating answers, with newer and more powerful systems emerging at an astonishing pace. In this paper we argue that all this (and future) progress can be directly applied to the retrieval problem with minimal intervention to the models' architecture. Previous work has explored ways to partition the search space into hierarchical structures and retrieve documents by autoregressively generating their unique identifier. In this work we propose an alternative that doesn't force any structure in the search space: using all ngrams in a passage as its possible identifiers. This setup allows us to use an autoregressive model to generate and score distinctive ngrams, that are then mapped to full passages through an efficient data structure. Empirically, we show this not only outperforms prior autoregressive approaches but also leads to an average improvement of at least 10 points over more established retrieval solutions for passage-level retrieval on the KILT benchmark, establishing new state-of-the-art downstream performance on some datasets, while using a considerably lighter memory footprint than competing systems. Code available …
[ Hall J ]
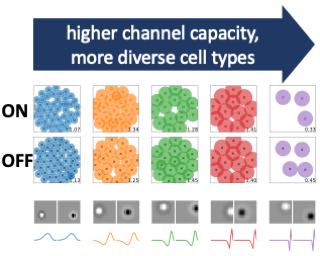
Among the most striking features of retinal organization is the grouping of its output neurons, the retinal ganglion cells (RGCs), into a diversity of functional types. Each of these types exhibits a mosaic-like organization of receptive fields (RFs) that tiles the retina and visual space. Previous work has shown that many features of RGC organization, including the existence of ON and OFF cell types, the structure of spatial RFs, and their relative arrangement, can be predicted on the basis of efficient coding theory. This theory posits that the nervous system is organized to maximize information in its encoding of stimuli while minimizing metabolic costs. Here, we use efficient coding theory to present a comprehensive account of mosaic organization in the case of natural videos as the retinal channel capacity---the number of simulated RGCs available for encoding---is varied. We show that mosaic density increases with channel capacity up to a series of critical points at which, surprisingly, new cell types emerge. Each successive cell type focuses on increasingly high temporal frequencies and integrates signals over larger spatial areas. In addition, we show theoretically and in simulation that a transition from mosaic alignment to anti-alignment across pairs of cell types is observed …
[ Hall J ]
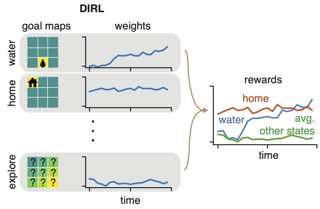
Understanding decision-making is a core goal in both neuroscience and psychology, and computational models have often been helpful in the pursuit of this goal. While many models have been developed for characterizing behavior in binary decision-making and bandit tasks, comparatively little work has focused on animal decision-making in more complex tasks, such as navigation through a maze. Inverse reinforcement learning (IRL) is a promising approach for understanding such behavior, as it aims to infer the unknown reward function of an agent from its observed trajectories through state space. However, IRL has yet to be widely applied in neuroscience. One potential reason for this is that existing IRL frameworks assume that an agent's reward function is fixed over time. To address this shortcoming, we introduce dynamic inverse reinforcement learning (DIRL), a novel IRL framework that allows for time-varying intrinsic rewards. Our method parametrizes the unknown reward function as a time-varying linear combination of spatial reward maps (which we refer to as "goal maps"). We develop an efficient inference method for recovering this dynamic reward function from behavioral data. We demonstrate DIRL in simulated experiments and then apply it to a dataset of mice exploring a labyrinth. Our method returns interpretable reward …
[ Hall J ]
With the advent of large language models, methods for abstractive summarization have made great strides, creating potential for use in applications to aid knowledge workers processing unwieldy document collections. One such setting is the Civil Rights Litigation Clearinghouse (CRLC, https://clearinghouse.net), which posts information about large-scale civil rights lawsuits, serving lawyers, scholars, and the general public. Today, summarization in the CRLC requires extensive training of lawyers and law students who spend hours per case understanding multiple relevant documents in order to produce high-quality summaries of key events and outcomes. Motivated by this ongoing real-world summarization effort, we introduce Multi-LexSum, a collection of 9,280 expert-authored summaries drawn from ongoing CRLC writing. Multi-LexSum presents a challenging multi-document summarization task given the length of the source documents, often exceeding two hundred pages per case. Furthermore, Multi-LexSum is distinct from other datasets in its multiple target summaries, each at a different granularity (ranging from one-sentence "extreme" summaries to multi-paragraph narrations of over five hundred words). We present extensive analysis demonstrating that despite the high-quality summaries in the training data (adhering to strict content and style guidelines), state-of-the-art summarization models perform poorly on this task. We release Multi-LexSum for further summarization research and to facilitate the …
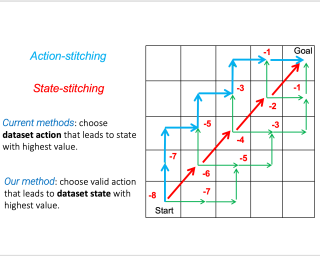
Offline reinforcement learning (RL) methods can generally be categorized into two types: RL-based and Imitation-based. RL-based methods could in principle enjoy out-of-distribution generalization but suffer from erroneous off-policy evaluation. Imitation-based methods avoid off-policy evaluation but are too conservative to surpass the dataset. In this study, we propose an alternative approach, inheriting the training stability of imitation-style methods while still allowing logical out-of-distribution generalization. We decompose the conventional reward-maximizing policy in offline RL into a guide-policy and an execute-policy. During training, the guide-poicy and execute-policy are learned using only data from the dataset, in a supervised and decoupled manner. During evaluation, the guide-policy guides the execute-policy by telling where it should go so that the reward can be maximized, serving as the \textit{Prophet}. By doing so, our algorithm allows \textit{state-compositionality} from the dataset, rather than \textit{action-compositionality} conducted in prior imitation-style methods. We dumb this new approach Policy-guided Offline RL (\texttt{POR}). \texttt{POR} demonstrates the state-of-the-art performance on D4RL, a standard benchmark for offline RL. We also highlight the benefits of \texttt{POR} in terms of improving with supplementary suboptimal data and easily adapting to new tasks by only changing the guide-poicy.
[ Hall J ]
A central problem in online learning and decision making---from bandits to reinforcement learning---is to understand what modeling assumptions lead to sample-efficient learning guarantees. We consider a general adversarial decision making framework that encompasses (structured) bandit problems with adversarial rewards and reinforcement learning problems with adversarial dynamics. Our main result is to show---via new upper and lower bounds---that the Decision-Estimation Coefficient, a complexity measure introduced by Foster et al. in the stochastic counterpart to our setting, is necessary and sufficient to obtain low regret for adversarial decision making. However, compared to the stochastic setting, one must apply the Decision-Estimation Coefficient to the convex hull of the class of models (or, hypotheses) under consideration. This establishes that the price of accommodating adversarial rewards or dynamics is governed by the behavior of the model class under convexification, and recovers a number of existing results --both positive and negative. En route to obtaining these guarantees, we provide new structural results that connect the Decision-Estimation Coefficient to variants of other well-known complexity measures, including the Information Ratio of Russo and Van Roy and the Exploration-by-Optimization objective of Lattimore and György.
[ Hall J ]
[ Hall J ]
The logit outputs of a feedforward neural network at initialization are conditionally Gaussian, given a random covariance matrix defined by the penultimate layer. In this work, we study the distribution of this random matrix. Recent work has shown that shaping the activation function as network depth grows large is necessary for this covariance matrix to be non-degenerate. However, the current infinite-width-style understanding of this shaping method is unsatisfactory for large depth: infinite-width analyses ignore the microscopic fluctuations from layer to layer, but these fluctuations accumulate over many layers. To overcome this shortcoming, we study the random covariance matrix in the shaped infinite-depth-and-width limit. We identify the precise scaling of the activation function necessary to arrive at a non-trivial limit, and show that the random covariance matrix is governed by a stochastic differential equation (SDE) that we call the Neural Covariance SDE. Using simulations, we show that the SDE closely matches the distribution of the random covariance matrix of finite networks. Additionally, we recover an if-and-only-if condition for exploding and vanishing norms of large shaped networks based on the activation function.
[ Hall J ]
We derive a novel approximation error bound with explicit prefactor for Sobolev-regular functions using deep convolutional neural networks (CNNs). The bound is non-asymptotic in terms of the network depth and filter lengths, in a rather flexible way. For Sobolev-regular functions which can be embedded into the H\"older space, the prefactor of our error bound depends on the ambient dimension polynomially instead of exponentially as in most existing results, which is of independent interest. We also establish a new approximation result when the target function is supported on an approximate lower-dimensional manifold. We apply our results to establish non-asymptotic excess risk bounds for classification using CNNs with convex surrogate losses, including the cross-entropy loss, the hinge loss (SVM), the logistic loss, the exponential loss and the least squares loss. We show that the classification methods with CNNs can circumvent the curse of dimensionality if input data is supported on a neighborhood of a low-dimensional manifold.
[ Hall J ]
We give a simple, generic conformal prediction method for sequential prediction that achieves target empirical coverage guarantees on adversarial data. It is computationally lightweight --- comparable to split conformal prediction --- but does not require having a held-out validation set, and so all data can be used for training models from which to derive a conformal score. Furthermore, it gives stronger than marginal coverage guarantees in two ways. First, it gives threshold-calibrated prediction sets that have correct empirical coverage even conditional on the threshold used to form the prediction set from the conformal score. Second, the user can specify an arbitrary collection of subsets of the feature space --- possibly intersecting --- and the coverage guarantees will also hold conditional on membership in each of these subsets. We call our algorithm MVP, short for MultiValid Prediction. We give both theory and an extensive set of empirical evaluations.
[ Hall J ]
We study a constructive procedure that approximates Gateaux derivatives for statistical functionals by finite-differencing, with attention to causal inference functionals. We focus on the case where probability distributions are not known a priori but need also to be estimated from data, leading to empirical Gateaux derivatives, and study relationships between empirical, numerical, and analytical Gateaux derivatives. Starting with a case study of counterfactual mean estimation, we verify the exact relationship between finite-differences and the analytical Gateaux derivative. We then derive requirements on the rates of numerical approximation in perturbation and smoothing that preserve statistical benefits. We study more complicated functionals such as dynamic treatment regimes and the linear-programming formulation for policy optimization infinite-horizon Markov decision processes. In the case of the latter, this approach can be used to approximate bias adjustments in the presence of arbitrary constraints, illustrating the usefulness of constructive approaches for Gateaux derivatives. We find that, omitting unfavorable dimension dependence of smoothing, although rate-double robustness permits for coarser rates of perturbation size than implied by generic approximation analysis of finite-differences for the case of the counterfactual mean, this is not the case for the infinite-horizon MDP policy value.
[ Hall J ]
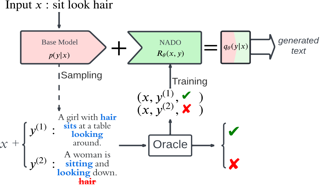
We propose a general and efficient framework to control auto-regressive generation models with NeurAlly-Decomposed Oracle (NADO). Given a pre-trained base language model and a sequence-level boolean oracle function, we aim to decompose the oracle function into token-level guidance to steer the base model in text generation. Specifically, the token-level guidance is provided by NADO, a neural model trained with examples sampled from the base model, demanding no additional auxiliary labeled data. Based on posterior regularization, we present the close-form optimal solution to incorporate the decomposed token-level guidance into the base model for controllable generation. We further discuss how the neural approximation affects the quality of the solution. These experiments conducted on two different applications: (1) text generation with lexical constraints and (2) machine translation with formality control demonstrate that our framework efficiently guides the base model towards the given oracle while keeping high generation quality.
[ Hall J ]
We introduce a simple but general online learning framework in which a learner plays against an adversary in a vector-valued game that changes every round. Even though the learner's objective is not convex-concave (and so the minimax theorem does not apply), we give a simple algorithm that can compete with the setting in which the adversary must announce their action first, with optimally diminishing regret. We demonstrate the power of our framework by using it to (re)derive optimal bounds and efficient algorithms across a variety of domains, ranging from multicalibration to a large set of no-regret algorithms, to a variant of Blackwell's approachability theorem for polytopes with fast convergence rates. As a new application, we show how to ``(multi)calibeat'' an arbitrary collection of forecasters --- achieving an exponentially improved dependence on the number of models we are competing against, compared to prior work.
[ Hall J ]
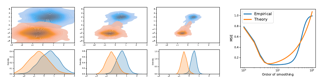
We analyze graph smoothing with mean aggregation, where each node successively receives the average of the features of its neighbors. Indeed, it has quickly been observed that Graph Neural Networks (GNNs), which generally follow some variant of Message-Passing (MP) with repeated aggregation, may be subject to the oversmoothing phenomenon: by performing too many rounds of MP, the node features tend to converge to a non-informative limit. In the case of mean aggregation, for connected graphs, the node features become constant across the whole graph. At the other end of the spectrum, it is intuitively obvious that some MP rounds are necessary, but existing analyses do not exhibit both phenomena at once: beneficial ``finite'' smoothing and oversmoothing in the limit. In this paper, we consider simplified linear GNNs, and rigorously analyze two examples for which a finite number of mean aggregation steps provably improves the learning performance, before oversmoothing kicks in. We consider a latent space random graph model, where node features are partial observations of the latent variables and the graph contains pairwise relationships between them. We show that graph smoothing restores some of the lost information, up to a certain point, by two phenomena: graph smoothing shrinks non-principal directions …
[ Hall J ]
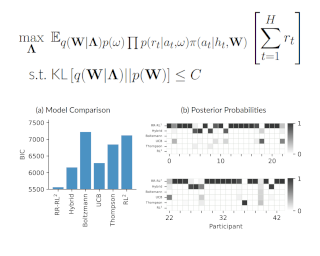
Equipping artificial agents with useful exploration mechanisms remains a challenge to this day. Humans, on the other hand, seem to manage the trade-off between exploration and exploitation effortlessly. In the present article, we put forward the hypothesis that they accomplish this by making optimal use of limited computational resources. We study this hypothesis by meta-learning reinforcement learning algorithms that sacrifice performance for a shorter description length (defined as the number of bits required to implement the given algorithm). The emerging class of models captures human exploration behavior better than previously considered approaches, such as Boltzmann exploration, upper confidence bound algorithms, and Thompson sampling. We additionally demonstrate that changing the description length in our class of models produces the intended effects: reducing description length captures the behavior of brain-lesioned patients while increasing it mirrors cognitive development during adolescence.
[ Hall J ]
We consider the task of training machine learning models with data-dependent constraints. Such constraints often arise as empirical versions of expected value constraints that enforce fairness or stability goals. We reformulate data-dependent constraints so that they are calibrated: enforcing the reformulated constraints guarantees that their expected value counterparts are satisfied with a user-prescribed probability. The resulting optimization problem is amendable to standard stochastic optimization algorithms, and we demonstrate the efficacy of our method on a fairness-sensitive classification task where we wish to guarantee the classifier's fairness (at test time).
[ Hall J ]
We initiate a formal study of reproducibility in optimization. We define a quantitative measure of reproducibility of optimization procedures in the face of noisy or error-prone operations such as inexact or stochastic gradient computations or inexact initialization. We then analyze several convex optimization settings of interest such as smooth, non-smooth, and strongly-convex objective functions and establish tight bounds on the limits of reproducibility in each setting. Our analysis reveals a fundamental trade-off between computation and reproducibility: more computation is necessary (and sufficient) for better reproducibility.
One concern with the rise of large language models lies with their potential for significant harm, particularly from pretraining on biased, obscene, copyrighted, and private information. Emerging ethical approaches have attempted to filter pretraining material, but such approaches have been ad hoc and failed to take context into account. We offer an approach to filtering grounded in law, which has directly addressed the tradeoffs in filtering material. First, we gather and make available the Pile of Law, a ~256GB (and growing) dataset of open-source English-language legal and administrative data, covering court opinions, contracts, administrative rules, and legislative records. Pretraining on the Pile of Law may help with legal tasks that have the promise to improve access to justice. Second, we distill the legal norms that governments have developed to constrain the inclusion of toxic or private content into actionable lessons for researchers and discuss how our dataset reflects these norms. Third, we show how the Pile of Law offers researchers the opportunity to learn such filtering rules directly from the data, providing an exciting new research direction in model-based processing.
[ Hall J ]
[ Hall J ]
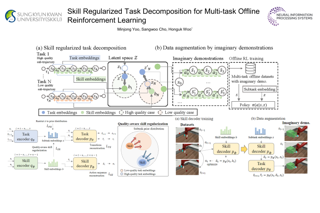
Reinforcement learning (RL) with diverse offline datasets can have the advantage of leveraging the relation of multiple tasks and the common skills learned across those tasks, hence allowing us to deal with real-world complex problems efficiently in a data-driven way. In offline RL where only offline data is used and online interaction with the environment is restricted, it is yet difficult to achieve the optimal policy for multiple tasks, especially when the data quality varies for the tasks. In this paper, we present a skill-based multi-task RL technique on heterogeneous datasets that are generated by behavior policies of different quality. To learn the shareable knowledge across those datasets effectively, we employ a task decomposition method for which common skills are jointly learned and used as guidance to reformulate a task in shared and achievable subtasks. In this joint learning, we use Wasserstein Auto-Encoder (WAE) to represent both skills and tasks on the same latent space and use the quality-weighted loss as a regularization term to induce tasks to be decomposed into subtasks that are more consistent with high-quality skills than others. To improve the performance of offline RL agents learned on the latent space, we also augment datasets with imaginary …
[ Hall J ]
In single positive multi-label learning (SPML), only one of multiple positive labels is observed for each instance. The previous work trains the model by simply treating unobserved labels as negative ones, and designs the regularization to constrain the number of expected positive labels. However, in many real-world scenarios, the true number of positive labels is unavailable, making such methods less applicable. In this paper, we propose to solve SPML problems by designing a Label-Aware global Consistency (LAC) regularization, which leverages the manifold structure information to enhance the recovery of potential positive labels. On one hand, we first perform pseudo-labeling for each unobserved label based on its prediction probability. The consistency regularization is then imposed on model outputs to balance the fitting of identified labels and exploring of potential positive labels. On the other hand, by enforcing label-wise embeddings to maintain global consistency, LAC loss encourages the model to learn more distinctive representations, which is beneficial for recovering the information of potential positive labels. Experiments on multiple benchmark datasets validate that the proposed method can achieve state-of-the-art performance for solving SPML tasks.
[ Hall J ]
[ Hall J ]
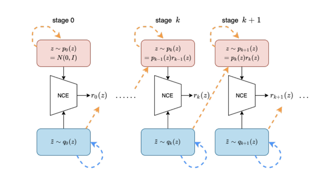
This paper studies the fundamental problem of learning energy-based model (EBM) in the latent space of the generator model. Learning such prior model typically requires running costly Markov Chain Monte Carlo (MCMC). Instead, we propose to use noise contrastive estimation (NCE) to discriminatively learn the EBM through density ratio estimation between the latent prior density and latent posterior density. However, the NCE typically fails to accurately estimate such density ratio given large gap between two densities. To effectively tackle this issue and further learn more expressive prior model, we develop the adaptive multi-stage density ratio estimation which breaks the estimation into multiple stages and learn different stages of density ratio sequentially and adaptively. The latent prior model can be gradually learned using ratio estimated in previous stage so that the final latent space EBM prior can be naturally formed by product of ratios in different stages. The proposed method enables informative and much sharper prior than existing baselines, and can be trained efficiently. Our experiments demonstrate strong performances in terms of image generation and reconstruction as well as anomaly detection.
[ Hall J ]

[ Hall J ]
Forecasting complex time series is ubiquitous and vital in a range of applications but challenging. Recent advances endeavor to achieve progress by incorporating various deep learning techniques (e.g., RNN and Transformer) into sequential models. However, clear patterns are still hard to extract since time series are often composed of several intricately entangled components. Motivated by the success of disentangled variational autoencoder in computer vision and classical time series decomposition, we plan to infer a couple of representations that depict seasonal and trend components of time series. To achieve this goal, we propose LaST, which, based on variational inference, aims to disentangle the seasonal-trend representations in the latent space. Furthermore, LaST supervises and disassociates representations from the perspectives of themselves and input reconstruction, and introduces a series of auxiliary objectives. Extensive experiments prove that LaST achieves state-of-the-art performance on time series forecasting task against the most advanced representation learning and end-to-end forecasting models. For reproducibility, our implementation is publicly available on Github.
[ Hall J ]

[ Hall J ]
We consider the classic facility location problem in fully dynamic data streams, where elements can be both inserted and deleted. In this problem, one is interested in maintaining a stable and high quality solution throughout the data stream while using only little time per update (insertion or deletion). We study the problem and provide the first algorithm that at the same time maintains a constant approximation and incurs polylogarithmic amortized recourse per update. We complement our theoretical results with an experimental analysis showing the practical efficiency of our method.
[ Hall J ]
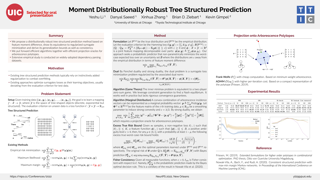
Structured prediction of tree-shaped objects is heavily studied under the name of syntactic dependency parsing. Current practice based on maximum likelihood or margin is either agnostic to or inconsistent with the evaluation loss. Risk minimization alleviates the discrepancy between training and test objectives but typically induces a non-convex problem. These approaches adopt explicit regularization to combat overfitting without probabilistic interpretation. We propose a moment-based distributionally robust optimization approach for tree structured prediction, where the worst-case expected loss over a set of distributions within bounded moment divergence from the empirical distribution is minimized. We develop efficient algorithms for arborescences and other variants of trees. We derive Fisher consistency, convergence rates and generalization bounds for our proposed method. We evaluate its empirical effectiveness on dependency parsing benchmarks.
[ Hall J ]
Social media has become the fulcrum of all forms of communication. Classifying social texts such as fake news, rumour, sarcasm, etc. has gained significant attention. The surface-level signals expressed by a social-text itself may not be adequate for such tasks; therefore, recent methods attempted to incorporate other intrinsic signals such as user behavior and the underlying graph structure. Oftentimes, the public wisdom expressed through the comments/replies to a social-text acts as a surrogate of crowd-sourced view and may provide us with complementary signals. State-of-the-art methods on social-text classification tend to ignore such a rich hierarchical signal. Here, we propose Hyphen, a discourse-aware hyperbolic spectral co-attention network. Hyphen is a fusion of hyperbolic graph representation learning with a novel Fourier co-attention mechanism in an attempt to generalise the social-text classification tasks by incorporating public discourse. We parse public discourse as an Abstract Meaning Representation (AMR) graph and use the powerful hyperbolic geometric representation to model graphs with hierarchical structure. Finally, we equip it with a novel Fourier co-attention mechanism to capture the correlation between the source post and public discourse. Extensive experiments on four different social-text classification tasks, namely detecting fake news, hate speech, rumour, and sarcasm, show that Hyphen generalises …
[ Hall J ]
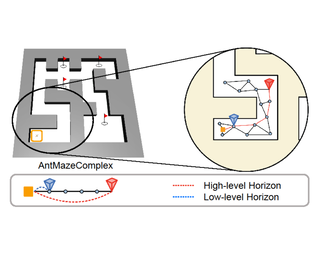
[ Hall J ]
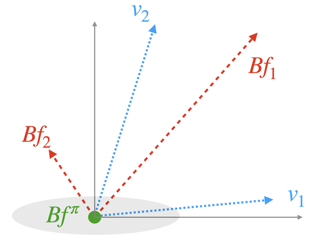
We propose and analyze a reinforcement learning principle thatapproximates the Bellman equations by enforcing their validity onlyalong a user-defined space of test functions. Focusing onapplications to model-free offline RL with function approximation, weexploit this principle to derive confidence intervals for off-policyevaluation, as well as to optimize over policies within a prescribedpolicy class. We prove an oracle inequality on our policyoptimization procedure in terms of a trade-off between the value anduncertainty of an arbitrary comparator policy. Different choices oftest function spaces allow us to tackle different problems within acommon framework. We characterize the loss of efficiency in movingfrom on-policy to off-policy data using our procedures, and establishconnections to concentrability coefficients studied in past work. Weexamine in depth the implementation of our methods with linearfunction approximation, and provide theoretical guarantees withpolynomial-time implementations even when Bellman closure does nothold.
[ Hall J ]
[ Hall J ]
[ Hall J ]
[ Hall J ]
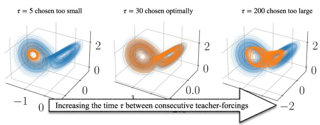
Recurrent neural networks (RNNs) are wide-spread machine learning tools for modeling sequential and time series data. They are notoriously hard to train because their loss gradients backpropagated in time tend to saturate or diverge during training. This is known as the exploding and vanishing gradient problem. Previous solutions to this issue either built on rather complicated, purpose-engineered architectures with gated memory buffers, or - more recently - imposed constraints that ensure convergence to a fixed point or restrict (the eigenspectrum of) the recurrence matrix. Such constraints, however, convey severe limitations on the expressivity of the RNN. Essential intrinsic dynamics such as multistability or chaos are disabled. This is inherently at disaccord with the chaotic nature of many, if not most, time series encountered in nature and society. It is particularly problematic in scientific applications where one aims to reconstruct the underlying dynamical system. Here we offer a comprehensive theoretical treatment of this problem by relating the loss gradients during RNN training to the Lyapunov spectrum of RNN-generated orbits. We mathematically prove that RNNs producing stable equilibrium or cyclic behavior have bounded gradients, whereas the gradients of RNNs with chaotic dynamics always diverge. Based on these analyses and insights we suggest …
[ Hall J ]
[ Hall J ]
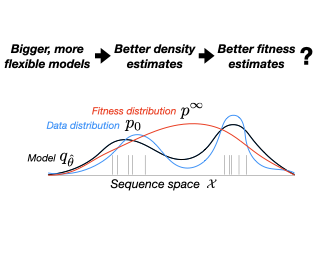
Understanding the consequences of mutation for molecular fitness and function is a fundamental problem in biology. Recently, generative probabilistic models have emerged as a powerful tool for estimating fitness from evolutionary sequence data, with accuracy sufficient to predict both laboratory measurements of function and disease risk in humans, and to design novel functional proteins. Existing techniques rest on an assumed relationship between density estimation and fitness estimation, a relationship that we interrogate in this article. We prove that fitness is not identifiable from observational sequence data alone, placing fundamental limits on our ability to disentangle fitness landscapes from phylogenetic history. We show on real datasets that perfect density estimation in the limit of infinite data would, with high confidence, result in poor fitness estimation; current models perform accurate fitness estimation because of, not despite, misspecification. Our results challenge the conventional wisdom that bigger models trained on bigger datasets will inevitably lead to better fitness estimation, and suggest novel estimation strategies going forward.
[ Hall J ]

Language model (LM) pre-training is useful in many language processing tasks. But can pre-trained LMs be further leveraged for more general machine learning problems? We propose an approach for using LMs to scaffold learning and generalization in general sequential decision-making problems. In this approach, goals and observations are represented as a sequence of embeddings, and a policy network initialized with a pre-trained LM predicts the next action. We demonstrate that this framework enables effective combinatorial generalization across different environments and supervisory modalities. We begin by assuming access to a set of expert demonstrations, and show that initializing policies with LMs and fine-tuning them via behavior cloning improves task completion rates by 43.6% in the VirtualHome environment. Next, we integrate an active data gathering procedure in which agents iteratively interact with the environment, relabel past "failed" experiences with new goals, and update their policies in a self-supervised loop. Active data gathering further improves combinatorial generalization, outperforming the best baseline by 25.1%. Finally, we explain these results by investigating three possible factors underlying the effectiveness of the LM-based policy. We find that sequential input representations (vs. fixed-dimensional feature vectors) and LM-based weight initialization are both important for generalization. Surprisingly, however, the format …
[ Hall J ]

Score-based generative models (SGMs) are a powerful class of generative models that exhibit remarkable empirical performance.Score-based generative modelling (SGM) consists of a noising'' stage, whereby a diffusion is used to gradually add Gaussian noise to data, and a generative model, which entails adenoising'' process defined by approximating the time-reversal of the diffusion. Existing SGMs assume that data is supported on a Euclidean space, i.e. a manifold with flat geometry. In many domains such as robotics, geoscience or protein modelling, data is often naturally described by distributions living on Riemannian manifolds and current SGM techniques are not appropriate. We introduce here \emph{Riemannian Score-based Generative Models} (RSGMs), a class of generative models extending SGMs to Riemannian manifolds. We demonstrate our approach on a variety of compact manifolds, and in particular with earth and climate science spherical data.
[ Hall J ]
A central issue in machine learning is how to train models on sensitive user data. Industry has widely adopted a simple algorithm: Stochastic Gradient Descent with noise (a.k.a. Stochastic Gradient Langevin Dynamics). However, foundational theoretical questions about this algorithm's privacy loss remain open---even in the seemingly simple setting of smooth convex losses over a bounded domain. Our main result resolves these questions: for a large range of parameters, we characterize the differential privacy up to a constant. This result reveals that all previous analyses for this setting have the wrong qualitative behavior. Specifically, while previous privacy analyses increase ad infinitum in the number of iterations, we show that after a small burn-in period, running SGD longer leaks no further privacy. Our analysis departs from previous approaches based on fast mixing, instead using techniques based on optimal transport (namely, Privacy Amplification by Iteration) and the Sampled Gaussian Mechanism (namely, Privacy Amplification by Sampling). Our techniques readily extend to other settings.
[ Hall J ]
Subgraph GNNs are a recent class of expressive Graph Neural Networks (GNNs) which model graphs as collections of subgraphs. So far, the design space of possible Subgraph GNN architectures as well as their basic theoretical properties are still largely unexplored. In this paper, we study the most prominent form of subgraph methods, which employs node-based subgraph selection policies such as ego-networks or node marking and deletion. We address two central questions: (1) What is the upper-bound of the expressive power of these methods? and (2) What is the family of equivariant message passing layers on these sets of subgraphs?. Our first step in answering these questions is a novel symmetry analysis which shows that modelling the symmetries of node-based subgraph collections requires a significantly smaller symmetry group than the one adopted in previous works. This analysis is then used to establish a link between Subgraph GNNs and Invariant Graph Networks (IGNs). We answer the questions above by first bounding the expressive power of subgraph methods by 3-WL, and then proposing a general family of message-passing layers for subgraph methods that generalises all previous node-based Subgraph GNNs. Finally, we design a novel Subgraph GNN dubbed SUN, which theoretically unifies previous architectures …
[ Hall J ]

Supervised learning aims to train a classifier under the assumption that training and test data are from the same distribution. To ease the above assumption, researchers have studied a more realistic setting: out-of-distribution (OOD) detection, where test data may come from classes that are unknown during training (i.e., OOD data). Due to the unavailability and diversity of OOD data, good generalization ability is crucial for effective OOD detection algorithms. To study the generalization of OOD detection, in this paper, we investigate the probably approximately correct (PAC) learning theory of OOD detection, which is proposed by researchers as an open problem. First, we find a necessary condition for the learnability of OOD detection. Then, using this condition, we prove several impossibility theorems for the learnability of OOD detection under some scenarios. Although the impossibility theorems are frustrating, we find that some conditions of these impossibility theorems may not hold in some practical scenarios. Based on this observation, we next give several necessary and sufficient conditions to characterize the learnability of OOD detection in some practical scenarios. Lastly, we also offer theoretical supports for several representative OOD detection works based on our OOD theory.
[ Hall J ]
Visual Counterfactual Explanations (VCEs) are an important tool to understand the decisions of an image classifier. They are “small” but “realistic” semantic changes of the image changing the classifier decision. Current approaches for the generation of VCEs are restricted to adversarially robust models and often contain non-realistic artefacts, or are limited to image classification problems with few classes. In this paper, we overcome this by generating Diffusion Visual Counterfactual Explanations (DVCEs) for arbitrary ImageNet classifiers via a diffusion process. Two modifications to the diffusion process are key for our DVCEs: first, an adaptive parameterization, whose hyperparameters generalize across images and models, together with distance regularization and late start of the diffusion process, allow us to generate images with minimal semantic changes to the original ones but different classification. Second, our cone regularization via an adversarially robust model ensures that the diffusion process does not converge to trivial non-semantic changes, but instead produces realistic images of the target class which achieve high confidence by the classifier.
[ Hall J ]

Multi-label learning (MLL) learns from the examples each associated with multiple labels simultaneously, where the high cost of annotating all relevant labels for each training example is challenging for real-world applications. To cope with the challenge, we investigate single-positive multi-label learning (SPMLL) where each example is annotated with only one relevant label and show that one can successfully learn a theoretically grounded multi-label classifier for the problem. In this paper, a novel SPMLL method named SMILE, i.e., Single-positive MultI-label learning with Label Enhancement, is proposed. Specifically, an unbiased risk estimator is derived, which could be guaranteed to approximately converge to the optimal risk minimizer of fully supervised learning and shows that one positive label of each instance is sufficient to train the predictive model. Then, the corresponding empirical risk estimator is established via recovering the latent soft label as a label enhancement process, where the posterior density of the latent soft labels is approximate to the variational Beta density parameterized by an inference model. Experiments on benchmark datasets validate the effectiveness of the proposed method.
[ Hall J ]
Recent studies show that graph convolutional network (GCN) often performs worse for low-degree nodes, exhibiting the so-called structural unfairness for graphs with long-tailed degree distributions prevalent in the real world. Graph contrastive learning (GCL), which marries the power of GCN and contrastive learning, has emerged as a promising self-supervised approach for learning node representations. How does GCL behave in terms of structural fairness? Surprisingly, we find that representations obtained by GCL methods are already fairer to degree bias than those learned by GCN. We theoretically show that this fairness stems from intra-community concentration and inter-community scatter properties of GCL, resulting in a much clear community structure to drive low-degree nodes away from the community boundary. Based on our theoretical analysis, we further devise a novel graph augmentation method, called GRAph contrastive learning for DEgree bias (GRADE), which applies different strategies to low- and high-degree nodes. Extensive experiments on various benchmarks and evaluation protocols validate the effectiveness of the proposed method.
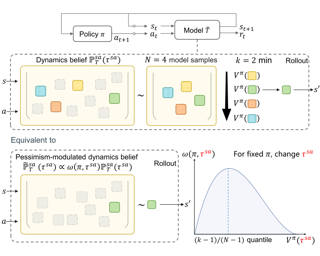
Model-based offline reinforcement learning (RL) aims to find highly rewarding policy, by leveraging a previously collected static dataset and a dynamics model. While the dynamics model learned through reuse of the static dataset, its generalization ability hopefully promotes policy learning if properly utilized. To that end, several works propose to quantify the uncertainty of predicted dynamics, and explicitly apply it to penalize reward. However, as the dynamics and the reward are intrinsically different factors in context of MDP, characterizing the impact of dynamics uncertainty through reward penalty may incur unexpected tradeoff between model utilization and risk avoidance. In this work, we instead maintain a belief distribution over dynamics, and evaluate/optimize policy through biased sampling from the belief. The sampling procedure, biased towards pessimism, is derived based on an alternating Markov game formulation of offline RL. We formally show that the biased sampling naturally induces an updated dynamics belief with policy-dependent reweighting factor, termed Pessimism-Modulated Dynamics Belief. To improve policy, we devise an iterative regularized policy optimization algorithm for the game, with guarantee of monotonous improvement under certain condition. To make practical, we further devise an offline RL algorithm to approximately find the solution. Empirical results show that the proposed approach …
[ Hall J ]
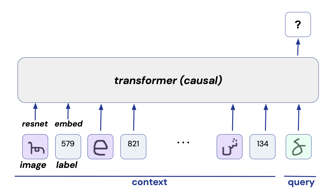
Large transformer-based models are able to perform in-context few-shot learning, without being explicitly trained for it. This observation raises the question: what aspects of the training regime lead to this emergent behavior? Here, we show that this behavior is driven by the distributions of the training data itself. In-context learning emerges when the training data exhibits particular distributional properties such as burstiness (items appear in clusters rather than being uniformly distributed over time) and having a large number of rarely occurring classes. In-context learning also emerges more strongly when item meanings or interpretations are dynamic rather than fixed. These properties are exemplified by natural language, but are also inherent to naturalistic data in a wide range of other domains. They also depart significantly from the uniform, i.i.d. training distributions typically used for standard supervised learning. In our initial experiments, we found that in-context learning traded off against more conventional weight-based learning, and models were unable to achieve both simultaneously. However, our later experiments uncovered that the two modes of learning could co-exist in a single model when it was trained on data following a skewed Zipfian distribution -- another common property of naturalistic data, including language. In further experiments, we …
[ Hall J ]
Consider the task of learning an unknown concept from a given concept class; to what extent does interacting with a domain expert accelerate the learning process? It is common to measure the effectiveness of learning algorithms by plotting the "learning curve", that is, the decay of the error rate as a function of the algorithm's resources (examples, queries, etc). Thus, the overarching question in this work is whether (and which kind of) interaction accelerates the learning curve. Previous work in interactive learning focused on uniform bounds on the learning rates which only capture the upper envelope of the learning curves over families of data distributions. We thus formalize our overarching question within the distribution dependent framework of universal learning, which aims to understand the performance of learning algorithms on every data distribution, but without requiring a single upper bound which applies uniformly to all distributions. Our main result reveals a fundamental trichotomy of interactive learning rates, thus providing a complete characterization of universal interactive learning. As a corollary we deduce a strong affirmative answer to our overarching question, showing that interaction is beneficial. Remarkably, we show that in important cases such benefits are realized with label queries, that is, by …
[ Hall J ]
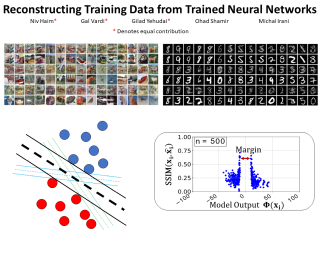
Understanding to what extent neural networks memorize training data is an intriguing question with practical and theoretical implications. In this paper we show that in some cases a significant fraction of the training data can in fact be reconstructed from the parameters of a trained neural network classifier.We propose a novel reconstruction scheme that stems from recent theoretical results about the implicit bias in training neural networks with gradient-based methods.To the best of our knowledge, our results are the first to show that reconstructing a large portion of the actual training samples from a trained neural network classifier is generally possible.This has negative implications on privacy, as it can be used as an attack for revealing sensitive training data. We demonstrate our method for binary MLP classifiers on a few standard computer vision datasets.
[ Hall J ]
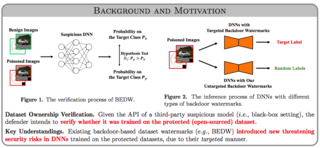
Deep neural networks (DNNs) have demonstrated their superiority in practice. Arguably, the rapid development of DNNs is largely benefited from high-quality (open-sourced) datasets, based on which researchers and developers can easily evaluate and improve their learning methods. Since the data collection is usually time-consuming or even expensive, how to protect their copyrights is of great significance and worth further exploration. In this paper, we revisit dataset ownership verification. We find that existing verification methods introduced new security risks in DNNs trained on the protected dataset, due to the targeted nature of poison-only backdoor watermarks. To alleviate this problem, in this work, we explore the untargeted backdoor watermarking scheme, where the abnormal model behaviors are not deterministic. Specifically, we introduce two dispersibilities and prove their correlation, based on which we design the untargeted backdoor watermark under both poisoned-label and clean-label settings. We also discuss how to use the proposed untargeted backdoor watermark for dataset ownership verification. Experiments on benchmark datasets verify the effectiveness of our methods and their resistance to existing backdoor defenses.
[ Hall J ]
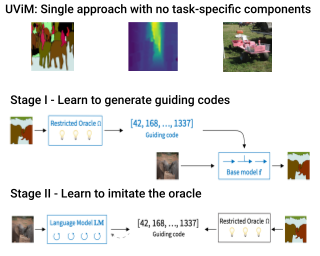
We introduce UViM, a unified approach capable of modeling a wide range of computer vision tasks. In contrast to previous models, UViM has the same functional form for all tasks; it requires no task-specific modifications which require extensive human expertise. The approach involves two components: (I) a base model (feed-forward) which is trained to directly predict raw vision outputs, guided by a learned discrete code and (II) a language model (autoregressive) that is trained to generate the guiding code. These components complement each other: the language model is well-suited to modeling structured interdependent data, while the base model is efficient at dealing with high-dimensional outputs. We demonstrate the effectiveness of UViM on three diverse and challenging vision tasks: panoptic segmentation, depth prediction and image colorization, where we achieve competitive and near state-of-the-art results. Our experimental results suggest that UViM is a promising candidate for a unified modeling approach in computer vision.
[ Hall J ]
[ Hall J ]

We introduce Breaking Bad, a large-scale dataset of fractured objects. Our dataset consists of over one million fractured objects simulated from ten thousand base models. The fracture simulation is powered by a recent physically based algorithm that efficiently generates a variety of fracture modes of an object. Existing shape assembly datasets decompose objects according to semantically meaningful parts, effectively modeling the construction process. In contrast, Breaking Bad models the destruction process of how a geometric object naturally breaks into fragments. Our dataset serves as a benchmark that enables the study of fractured object reassembly and presents new challenges for geometric shape understanding. We analyze our dataset with several geometry measurements and benchmark three state-of-the-art shape assembly deep learning methods under various settings. Extensive experimental results demonstrate the difficulty of our dataset, calling on future research in model designs specifically for the geometric shape assembly task. We host our dataset at https://breaking-bad-dataset.github.io/.
[ Hall J ]
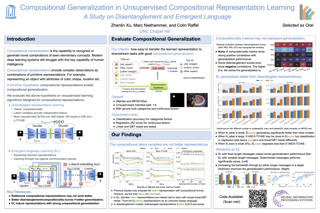
[ Hall J ]
Decision-focused learning (DFL) was recently proposed for stochastic optimization problems that involve unknown parameters. By integrating predictive modeling with an implicitly differentiable optimization layer, DFL has shown superior performance to the standard two-stage predict-then-optimize pipeline. However, most existing DFL methods are only applicable to convex problems or a subset of nonconvex problems that can be easily relaxed to convex ones. Further, they can be inefficient in training due to the requirement of solving and differentiating through the optimization problem in every training iteration. We propose SO-EBM, a general and efficient DFL method for stochastic optimization using energy-based models. Instead of relying on KKT conditions to induce an implicit optimization layer, SO-EBM explicitly parameterizes the original optimization problem using a differentiable optimization layer based on energy functions. To better approximate the optimization landscape, we propose a coupled training objective that uses a maximum likelihood loss to capture the optimum location and a distribution-based regularizer to capture the overall energy landscape. Finally, we propose an efficient training procedure for SO-EBM with a self-normalized importance sampler based on a Gaussian mixture proposal. We evaluate SO-EBM in three applications: power scheduling, COVID-19 resource allocation, and non-convex adversarial security game, demonstrating the effectiveness and efficiency …
[ Hall J ]
Controlling the behavior of language models (LMs) without re-training is a major open problem in natural language generation. While recent works have demonstrated successes on controlling simple sentence attributes (e.g., sentiment), there has been little progress on complex, fine-grained controls (e.g., syntactic structure). To address this challenge, we develop a new non-autoregressive language model based on continuous diffusions that we call Diffusion-LM. Building upon the recent successes of diffusion models in continuous domains, Diffusion-LM iteratively denoises a sequence of Gaussian vectors into word vectors, yielding a sequence of intermediate latent variables. The continuous, hierarchical nature of these intermediate variables enables a simple gradient-based algorithm to perform complex, controllable generation tasks. We demonstrate successful control of Diffusion-LM for six challenging fine-grained control tasks, significantly outperforming prior work.
[ Hall J ]
The use of cameras and computational algorithms for noninvasive, low-cost and scalable measurement of physiological (e.g., cardiac and pulmonary) vital signs is very attractive. However, diverse data representing a range of environments, body motions, illumination conditions and physiological states is laborious, time consuming and expensive to obtain. Synthetic data have proven a valuable tool in several areas of machine learning, yet are not widely available for camera measurement of physiological states. Synthetic data offer "perfect" labels (e.g., without noise and with precise synchronization), labels that may not be possible to obtain otherwise (e.g., precise pixel level segmentation maps) and provide a high degree of control over variation and diversity in the dataset. We present SCAMPS, a dataset of synthetics containing 2,800 videos (1.68M frames) with aligned cardiac and respiratory signals and facial action intensities. The RGB frames are provided alongside segmentation maps and precise descriptive statistics about the underlying waveforms, including inter-beat interval, heart rate variability, and pulse arrival time. Finally, we present baseline results training on these synthetic data and testing on real-world datasets to illustrate generalizability.
[ Hall J ]
As language models grow ever larger, the need for large-scale high-quality text datasets has never been more pressing, especially in multilingual settings. The BigScience workshop, a 1-year international and multidisciplinary initiative, was formed with the goal of researching and training large language models as a values-driven undertaking, putting issues of ethics, harm, and governance in the foreground. This paper documents the data creation and curation efforts undertaken by BigScience to assemble the Responsible Open-science Open-collaboration Text Sources (ROOTS) corpus, a 1.6TB dataset spanning 59 languages that was used to train the 176-billion-parameter BigScience Large Open-science Open-access Multilingual (BLOOM) language model. We further release a large initial subset of the corpus and analyses thereof, and hope to empower large-scale monolingual and multilingual modeling projects with both the data and the processing tools, as well as stimulate research around this large multilingual corpus.
[ Hall J ]
The incorporation of cutting planes within the branch-and-bound algorithm, known as branch-and-cut, forms the backbone of modern integer programming solvers. These solvers are the foremost method for solving discrete optimization problems and thus have a vast array of applications in machine learning, operations research, and many other fields. Choosing cutting planes effectively is a major research topic in the theory and practice of integer programming. We conduct a novel structural analysis of branch-and-cut that pins down how every step of the algorithm is affected by changes in the parameters defining the cutting planes added to the input integer program. Our main application of this analysis is to derive sample complexity guarantees for using machine learning to determine which cutting planes to apply during branch-and-cut. These guarantees apply to infinite families of cutting planes, such as the family of Gomory mixed integer cuts, which are responsible for the main breakthrough speedups of integer programming solvers. We exploit geometric and combinatorial structure of branch-and-cut in our analysis, which provides a key missing piece for the recent generalization theory of branch-and-cut.
[ Hall J ]
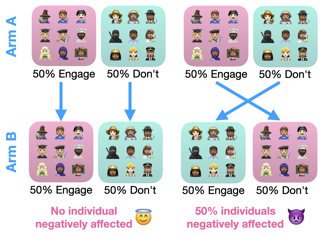
The fundamental problem of causal inference -- that we never observe counterfactuals -- prevents us from identifying how many might be negatively affected by a proposed intervention. If, in an A/B test, half of users click (or buy, or watch, or renew, etc.), whether exposed to the standard experience A or a new one B, hypothetically it could be because the change affects no one, because the change positively affects half the user population to go from no-click to click while negatively affecting the other half, or something in between. While unknowable, this impact is clearly of material importance to the decision to implement a change or not, whether due to fairness, long-term, systemic, or operational considerations. We therefore derive the tightest-possible (i.e., sharp) bounds on the fraction negatively affected (and other related estimands) given data with only factual observations, whether experimental or observational. Naturally, the more we can stratify individuals by observable covariates, the tighter the sharp bounds. Since these bounds involve unknown functions that must be learned from data, we develop a robust inference algorithm that is efficient almost regardless of how and how fast these functions are learned, remains consistent when some are mislearned, and still gives …
[ Hall J ]
Sequential Monte Carlo (SMC) is an inference algorithm for state space models that approximates the posterior by sampling from a sequence of target distributions. The target distributions are often chosen to be the filtering distributions, but these ignore information from future observations, leading to practical and theoretical limitations in inference and model learning. We introduce SIXO, a method that instead learns target distributions that approximate the smoothing distributions, incorporating information from all observations. The key idea is to use density ratio estimation to fit functions that warp the filtering distributions into the smoothing distributions. We then use SMC with these learned targets to define a variational objective for model and proposal learning. SIXO yields provably tighter log marginal lower bounds and offers more accurate posterior inferences and parameter estimates in a variety of domains.
[ Hall J ]
[ Hall J ]

[ Hall J ]
Extreme compression, particularly ultra-low bit precision (binary/ternary) quantization, has been proposed to fit large NLP models on resource-constraint devices. However, to preserve the accuracy for such aggressive compression schemes, cutting-edge methods usually introduce complicated compression pipelines, e.g., multi-stage expensive knowledge distillation with extensive hyperparameter tuning. Also, they oftentimes focus less on smaller transformer models that have already been heavily compressed via knowledge distillation and lack a systematic study to show the effectiveness of their methods.In this paper, we perform a very comprehensive systematic study to measure the impact of many key hyperparameters and training strategies from previous. As a result, we find out that previous baselines for ultra-low bit precision quantization are significantly under-trained. Based on our study, we propose a simple yet effective compression pipeline for extreme compression. Our simplified pipeline demonstrates that(1) we can skip the pre-training knowledge distillation to obtain a 5-layer \bert while achieving better performance than previous state-of-the-art methods, like TinyBERT; (2) extreme quantization plus layer reduction is able to reduce the model size by 50x, resulting in new state-of-the-art results on GLUE tasks.
[ Hall J ]
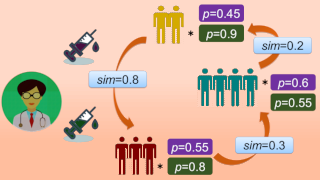
This paper introduces a general multi-agent bandit model in which each agent is facing a finite set of arms and may communicate with other agents through a central controller in order to identify -in pure exploration- or play -in regret minimization- its optimal arm. The twist is that the optimal arm for each agent is the arm with largest expected mixed reward, where the mixed reward of an arm is a weighted sum of the rewards of this arm for all agents. This makes communication between agents often necessary. This general setting allows to recover and extend several recent models for collaborative bandit learning, including the recently proposed federated learning with personalization [Shi et al., 2021]. In this paper, we provide new lower bounds on the sample complexity of pure exploration and on the regret. We then propose a near-optimal algorithm for pure exploration. This algorithm is based on phased elimination with two novel ingredients: a data-dependent sampling scheme within each phase, aimed at matching a relaxation of the lower bound.
[ Hall J ]
Despite the considerable progress in automatic abdominal multi-organ segmentation from CT/MRI scans in recent years, a comprehensive evaluation of the models' capabilities is hampered by the lack of a large-scale benchmark from diverse clinical scenarios. Constraint by the high cost of collecting and labeling 3D medical data, most of the deep learning models to date are driven by datasets with a limited number of organs of interest or samples, which still limits the power of modern deep models and makes it difficult to provide a fully comprehensive and fair estimate of various methods. To mitigate the limitations, we present AMOS, a large-scale, diverse, clinical dataset for abdominal organ segmentation. AMOS provides 500 CT and 100 MRI scans collected from multi-center, multi-vendor, multi-modality, multi-phase, multi-disease patients, each with voxel-level annotations of 15 abdominal organs, providing challenging examples and test-bed for studying robust segmentation algorithms under diverse targets and scenarios. We further benchmark several state-of-the-art medical segmentation models to evaluate the status of the existing methods on this new challenging dataset. We have made our datasets, benchmark servers, and baselines publicly available, and hope to inspire future research. Information can be found at https://amos22.grand-challenge.org.
[ Hall J ]
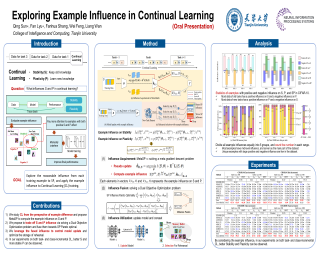
Continual Learning (CL) sequentially learns new tasks like human beings, with the goal to achieve better Stability (S, remembering past tasks) and Plasticity (P, adapting to new tasks). Due to the fact that past training data is not available, it is valuable to explore the influence difference on S and P among training examples, which may improve the learning pattern towards better SP. Inspired by Influence Function (IF), we first study example influence via adding perturbation to example weight and computing the influence derivation. To avoid the storage and calculation burden of Hessian inverse in neural networks, we propose a simple yet effective MetaSP algorithm to simulate the two key steps in the computation of IF and obtain the S- and P-aware example influence. Moreover, we propose to fuse two kinds of example influence by solving a dual-objective optimization problem, and obtain a fused influence towards SP Pareto optimality. The fused influence can be used to control the update of model and optimize the storage of rehearsal. Empirical results show that our algorithm significantly outperforms state-of-the-art methods on both task- and class-incremental benchmark CL datasets.
[ Hall J ]
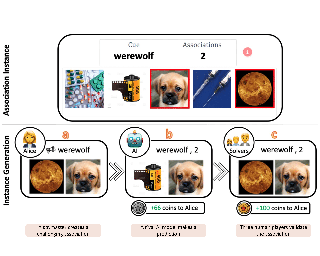
While vision-and-language models perform well on tasks such as visual question answering, they struggle when it comes to basic human commonsense reasoning skills. In this work, we introduce WinoGAViL: an online game of vision-and-language associations (e.g., between werewolves and a full moon), used as a dynamic evaluation benchmark. Inspired by the popular card game Codenames, a spymaster gives a textual cue related to several visual candidates, and another player tries to identify them. Human players are rewarded for creating associations that are challenging for a rival AI model but still solvable by other human players. We use the game to collect 3.5K instances, finding that they are intuitive for humans (>90% Jaccard index) but challenging for state-of-the-art AI models, where the best model (ViLT) achieves a score of 52%, succeeding mostly where the cue is visually salient. Our analysis as well as the feedback we collect from players indicate that the collected associations require diverse reasoning skills, including general knowledge, common sense, abstraction, and more. We release the dataset, the code and the interactive game, allowing future data collection that can be used to develop models with better association abilities.
[ Hall J ]

Multi-modal learning is essential for understanding information in the real world. Jointly learning from multi-modal data enables global integration of both shared and modality-specific information, but current strategies often fail when observa- tions from certain modalities are incomplete or missing for part of the subjects. To learn comprehensive representations based on such modality-incomplete data, we present a semi-supervised neural network model called CLUE (Cross-Linked Unified Embedding). Extending from multi-modal VAEs, CLUE introduces the use of cross-encoders to construct latent representations from modality-incomplete observations. Representation learning for modality-incomplete observations is common in genomics. For example, human cells are tightly regulated across multi- ple related but distinct modalities such as DNA, RNA, and protein, jointly defining a cell’s function. We benchmark CLUE on multi-modal data from single cell measurements, illustrating CLUE’s superior performance in all assessed categories of the NeurIPS 2021 Multimodal Single-cell Data Integration Competition. While we focus on analysis of single cell genomic datasets, we note that the proposed cross-linked embedding strategy could be readily applied to other cross-modality representation learning problems.
[ Hall J ]
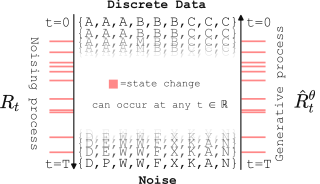
We provide the first complete continuous time framework for denoising diffusion models of discrete data. This is achieved by formulating the forward noising process and corresponding reverse time generative process as Continuous Time Markov Chains (CTMCs). The model can be efficiently trained using a continuous time version of the ELBO. We simulate the high dimensional CTMC using techniques developed in chemical physics and exploit our continuous time framework to derive high performance samplers that we show can outperform discrete time methods for discrete data. The continuous time treatment also enables us to derive a novel theoretical result bounding the error between the generated sample distribution and the true data distribution.
[ Hall J ]
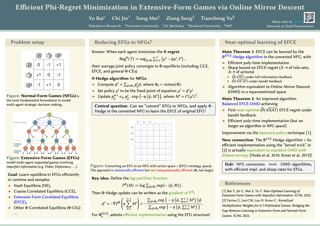
[ Hall J ]
Widely observed neural scaling laws, in which error falls off as a power of the training set size, model size, or both, have driven substantial performance improvements in deep learning. However, these improvements through scaling alone require considerable costs in compute and energy. Here we focus on the scaling of error with dataset size and show how in theory we can break beyond power law scaling and potentially even reduce it to exponential scaling instead if we have access to a high-quality data pruning metric that ranks the order in which training examples should be discarded to achieve any pruned dataset size. We then test this improved scaling prediction with pruned dataset size empirically, and indeed observe better than power law scaling in practice on ResNets trained on CIFAR-10, SVHN, and ImageNet. Next, given the importance of finding high-quality pruning metrics, we perform the first large-scale benchmarking study of ten different data pruning metrics on ImageNet. We find most existing high performing metrics scale poorly to ImageNet, while the best are computationally intensive and require labels for every image. We therefore developed a new simple, cheap and scalable self-supervised pruning metric that demonstrates comparable performance to the best supervised metrics. …
[ Hall J ]
Humans have a remarkable ability to rapidly generalize to new tasks that is difficult to reproduce in artificial learning systems.Compositionality has been proposed as a key mechanism supporting generalization in humans, but evidence of its neural implementation and impact on behavior is still scarce. Here we study the computational properties associated with compositional generalization in both humans and artificial neural networks (ANNs) on a highly compositional task. First, we identified behavioral signatures of compositional generalization in humans, along with their neural correlates using whole-cortex functional magnetic resonance imaging (fMRI) data. Next, we designed pretraining paradigms aided by a procedure we term primitives pretraining to endow compositional task elements into ANNs. We found that ANNs with this prior knowledge had greater correspondence with human behavior and neural compositional signatures. Importantly, primitives pretraining induced abstract internal representations, excellent zero-shot generalization, and sample-efficient learning. Moreover, it gave rise to a hierarchy of abstract representations that matched human fMRI data, where sensory rule abstractions emerged in early sensory areas, and motor rule abstractions emerged in later motor areas. Our findings give empirical support to the role of compositional generalization in humans behavior, implicate abstract representations as its neural implementation, and illustrate that these representations …
[ Hall J ]
[ Hall J ]
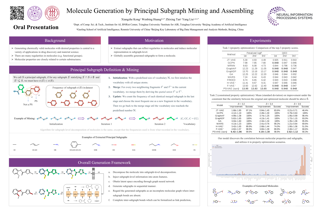
Molecule generation is central to a variety of applications. Current attention has been paid to approaching the generation task as subgraph prediction and assembling. Nevertheless, these methods usually rely on hand-crafted or external subgraph construction, and the subgraph assembling depends solely on local arrangement. In this paper, we define a novel notion, principal subgraph that is closely related to the informative pattern within molecules. Interestingly, our proposed merge-and-update subgraph extraction method can automatically discover frequent principal subgraphs from the dataset, while previous methods are incapable of. Moreover, we develop a two-step subgraph assembling strategy, which first predicts a set of subgraphs in a sequence-wise manner and then assembles all generated subgraphs globally as the final output molecule. Built upon graph variational auto-encoder, our model is demonstrated to be effective in terms of several evaluation metrics and efficiency, compared with state-of-the-art methods on distribution learning and (constrained) property optimization tasks.
[ Hall J ]
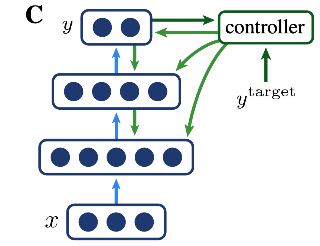
Equilibrium systems are a powerful way to express neural computations. As special cases, they include models of great current interest in both neuroscience and machine learning, such as deep neural networks, equilibrium recurrent neural networks, deep equilibrium models, or meta-learning. Here, we present a new principle for learning such systems with a temporally- and spatially-local rule. Our principle casts learning as a \emph{least-control} problem, where we first introduce an optimal controller to lead the system towards a solution state, and then define learning as reducing the amount of control needed to reach such a state. We show that incorporating learning signals within a dynamics as an optimal control enables transmitting activity-dependent credit assignment information, avoids storing intermediate states in memory, and does not rely on infinitesimal learning signals. In practice, our principle leads to strong performance matching that of leading gradient-based learning methods when applied to an array of problems involving recurrent neural networks and meta-learning. Our results shed light on how the brain might learn and offer new ways of approaching a broad class of machine learning problems.
[ Hall J ]
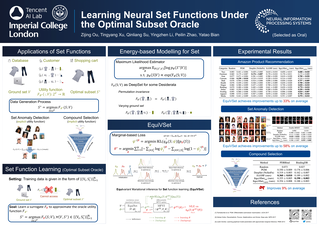
Learning set functions becomes increasingly important in many applications like product recommendation and compound selection in AI-aided drug discovery. The majority of existing works study methodologies of set function learning under the function value oracle, which, however, requires expensive supervision signals. This renders it impractical for applications with only weak supervisions under the Optimal Subset (OS) oracle, the study of which is surprisingly overlooked. In this work, we present a principled yet practical maximum likelihood learning framework, termed as EquiVSet, that simultaneously meets the following desiderata of learning neural set functions under the OS oracle: i) permutation invariance of the set mass function being modeled; ii) permission of varying ground set; iii) minimum prior and iv) scalability. The main components of our framework involve: an energy-based treatment of the set mass function, DeepSet-style architectures to handle permutation invariance, mean-field variational inference, and its amortized variants. Thanks to the delicate combination of these advanced architectures, empirical studies on three real-world applications (including Amazon product recommendation, set anomaly detection, and compound selection for virtual screening) demonstrate that EquiVSet outperforms the baselines by a large margin.
[ Hall J ]
The past few years have seen the development of many benchmarks for Neural Architecture Search (NAS), fueling rapid progress in NAS research. However, recent work, which shows that good hyperparameter settings can be more important than using the best architecture, calls for a shift in focus towards Joint Architecture and Hyperparameter Search (JAHS). Therefore, we present JAHS-Bench-201, the first collection of surrogate benchmarks for JAHS, built to also facilitate research on multi-objective, cost-aware and (multi) multi-fidelity optimization algorithms. To the best of our knowledge, JAHS-Bench-201 is based on the most extensive dataset of neural network performance data in the public domain. It is composed of approximately 161 million data points and 20 performance metrics for three deep learning tasks, while featuring a 14-dimensional search and fidelity space that extends the popular NAS-Bench-201 space. With JAHS-Bench-201, we hope to democratize research on JAHS and lower the barrier to entry of an extremely compute intensive field, e.g., by reducing the compute time to run a JAHS algorithm from 5 days to only a few seconds.
[ Hall J ]
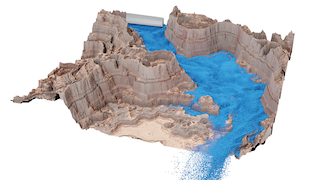
We present a novel method for guaranteeing linear momentum in learned physics simulations. Unlike existing methods, we enforce conservation of momentum with a hard constraint, which we realize via antisymmetrical continuous convolutional layers. We combine these strict constraints with a hierarchical network architecture, a carefully constructed resampling scheme, and a training approach for temporal coherence. In combination, the proposed method allows us to increase the physical accuracy of the learned simulator substantially. In addition, the induced physical bias leads to significantly better generalization performance and makes our method more reliable in unseen test cases. We evaluate our method on a range of different, challenging fluid scenarios. Among others, we demonstrate that our approach generalizes to new scenarios with up to one million particles. Our results show that the proposed algorithm can learn complex dynamics while outperforming existing approaches in generalization and training performance. An implementation of our approach is available at https://github.com/tum-pbs/DMCF.
[ Hall J ]

In any given machine learning problem, there may be many models that could explain the data almost equally well. However, most learning algorithms return only one of these models, leaving practitioners with no practical way to explore alternative models that might have desirable properties beyond what could be expressed within a loss function. The Rashomon set is the set of these all almost-optimal models. Rashomon sets can be extremely complicated, particularly for highly nonlinear function classes that allow complex interaction terms, such as decision trees. We provide the first technique for completely enumerating the Rashomon set for sparse decision trees; in fact, our work provides the first complete enumeration of any Rashomon set for a non-trivial problem with a highly nonlinear discrete function class. This allows the user an unprecedented level of control over model choice among all models that are approximately equally good. We represent the Rashomon set in a specialized data structure that supports efficient querying and sampling. We show three applications of the Rashomon set: 1) it can be used to study variable importance for the set of almost-optimal trees (as opposed to a single tree), 2) the Rashomon set for accuracy enables enumeration of the Rashomon …
[ Hall J ]
In fair rent division, the problem is to assign rooms to roommates and fairly split the rent based on roommates' reported valuations for the rooms. Envy-free rent division is the most popular application on the fair division website Spliddit. The standard model assumes that agents can correctly report their valuations for each room. In practice, agents may be unsure about their valuations, for example because they have had only limited time to inspect the rooms. Our goal is to find a robust rent division that remains fair even if agent valuations are slightly different from the reported ones. We introduce the lexislack solution, which selects a rent division that remains envy-free for valuations within as large a radius as possible of the reported valuations. We also consider robustness notions for valuations that come from a probability distribution, and use results from learning theory to show how we can find rent divisions that (almost) maximize the probability of being envy-free, or that minimize the expected envy. We show that an almost optimal allocation can be identified based on polynomially many samples from the valuation distribution. Finding the best allocation given these samples is NP-hard, but in practice such an allocation can …
[ Hall J ]
[ Hall J ]
We study the problem of learning generalized linear models under adversarial corruptions.We analyze a classical heuristic called the \textit{iterative trimmed maximum likelihood estimator} which is known to be effective against \textit{label corruptions} in practice. Under label corruptions, we prove that this simple estimator achieves minimax near-optimal risk on a wide range of generalized linear models, including Gaussian regression, Poisson regression and Binomial regression. Finally, we extend the estimator to the much more challenging setting of \textit{label and covariate corruptions} and demonstrate its robustness and optimality in that setting as well.
[ Hall J ]

Strong inductive biases give humans the ability to quickly learn to perform a variety of tasks. Although meta-learning is a method to endow neural networks with useful inductive biases, agents trained by meta-learning may sometimes acquire very different strategies from humans. We show that co-training these agents on predicting representations from natural language task descriptions and programs induced to generate such tasks guides them toward more human-like inductive biases. Human-generated language descriptions and program induction models that add new learned primitives both contain abstract concepts that can compress description length. Co-training on these representations result in more human-like behavior in downstream meta-reinforcement learning agents than less abstract controls (synthetic language descriptions, program induction without learned primitives), suggesting that the abstraction supported by these representations is key.
[ Hall J ]
[ Hall J ]
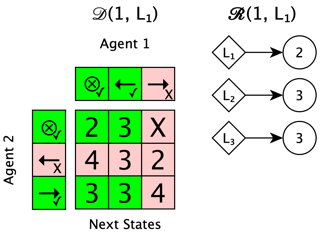
Learning safe solutions is an important but challenging problem in multi-agent reinforcement learning (MARL). Shielded reinforcement learning is one approach for preventing agents from choosing unsafe actions. Current shielded reinforcement learning methods for MARL make strong assumptions about communication and full observability. In this work, we extend the formalization of the shielded reinforcement learning problem to a decentralized multi-agent setting. We then present an algorithm for decomposition of a centralized shield, allowing shields to be used in such decentralized, communication-free environments. Our results show that agents equipped with decentralized shields perform comparably to agents with centralized shields in several tasks, allowing shielding to be used in environments with decentralized training and execution for the first time.
[ Hall J ]
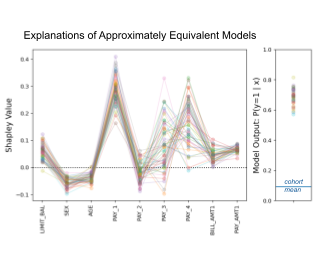
There has been a significant research effort focused on explaining predictive models, for example through post-hoc explainability and recourse methods. Most of the proposed techniques operate upon a single, fixed, predictive model. However, it is well-known that given a dataset and a predictive task, there may be a multiplicity of models that solve the problem (nearly) equally well. In this work, we investigate the implications of this kind of model indeterminacy on the post-hoc explanations of predictive models. We show how it can lead to explanatory multiplicity, and we explore the underlying drivers. We show how predictive multiplicity, and the related concept of epistemic uncertainty, are not reliable indicators of explanatory multiplicity. We further illustrate how a set of models showing very similar aggregate performance on a test dataset may show large variations in their local explanations, i.e., for a specific input. We explore these effects for Shapley value based explanations on three risk assessment datasets. Our results indicate that model indeterminacy may have a substantial impact on explanations in practice, leading to inconsistent and even contradicting explanations.
[ Hall J ]
Bayesian coresets approximate a posterior distribution by building a small weighted subset of the data points. Any inference procedure that is too computationally expensive to be run on the full posterior can instead be run inexpensively on the coreset, with results that approximate those on the full data. However, current approaches are limited by either a significant run-time or the need for the user to specify a low-cost approximation to the full posterior. We propose a Bayesian coreset construction algorithm that first selects a uniformly random subset of data, and then optimizes the weights using a novel quasi-Newton method. Our algorithm is a simple to implement, black-box method, that does not require the user to specify a low-cost posterior approximation. It is the first to come with a general high-probability bound on the KL divergence of the output coreset posterior. Experiments demonstrate that our method provides significant improvements in coreset quality against alternatives with comparable construction times, with far less storage cost and user input required.
[ Hall J ]
We consider the problem of producing fair probabilistic classifiers for multi-class classification tasks. We formulate this problem in terms of ``projecting'' a pre-trained (and potentially unfair) classifier onto the set of models that satisfy target group-fairness requirements. The new, projected model is given by post-processing the outputs of the pre-trained classifier by a multiplicative factor. We provide a parallelizable, iterative algorithm for computing the projected classifier and derive both sample complexity and convergence guarantees. Comprehensive numerical comparisons with state-of-the-art benchmarks demonstrate that our approach maintains competitive performance in terms of accuracy-fairness trade-off curves, while achieving favorable runtime on large datasets. We also evaluate our method at scale on an open dataset with multiple classes, multiple intersectional groups, and over 1M samples.
[ Hall J ]
Pretraining on noisy, internet-scale datasets has been heavily studied as a technique for training models with broad, general capabilities for text, images, and other modalities. However, for many sequential decision domains such as robotics, video games, and computer use, publicly available data does not contain the labels required to train behavioral priors in the same way. We extend the internet-scale pretraining paradigm to sequential decision domains through semi-supervised imitation learning wherein agents learn to act by watching online unlabeled videos. Specifically, we show that with a small amount of labeled data we can train an inverse dynamics model accurate enough to label a huge unlabeled source of online data -- here, online videos of people playing Minecraft -- from which we can then train a general behavioral prior. Despite using the native human interface (mouse and keyboard at 20Hz), we show that this behavioral prior has nontrivial zero-shot capabilities and that it can be fine-tuned, with both imitation learning and reinforcement learning, to hard-exploration tasks that are impossible to learn from scratch via reinforcement learning. For many tasks our models exhibit human-level performance, and we are the first to report computer agents that can craft diamond tools, which can take …
[ Hall J ]
In this work, we present the Textless Vision-Language Transformer (TVLT), where homogeneous transformer blocks take raw visual and audio inputs for vision-and-language representation learning with minimal modality-specific design, and do not use text-specific modules such as tokenization or automatic speech recognition (ASR). TVLT is trained by reconstructing masked patches of continuous video frames and audio spectrograms (masked autoencoding) and contrastive modeling to align video and audio. TVLT attains performance comparable to its text-based counterpart on various multimodal tasks, such as visual question answering, image retrieval, video retrieval, and multimodal sentiment analysis, with 28x faster inference speed and only 1/3 of the parameters. Our findings suggest the possibility of learning compact and efficient visual-linguistic representations from low-level visual and audio signals without assuming the prior existence of text. Our code and checkpoints are available at: https://github.com/zinengtang/TVLT
[ Hall J ]
The error-backpropagation (backprop) algorithm remains the most common solution to the credit assignment problem in artificial neural networks. In neuroscience, it is unclear whether the brain could adopt a similar strategy to correctly modify its synapses. Recent models have attempted to bridge this gap while being consistent with a range of experimental observations. However, these models are either unable to effectively backpropagate error signals across multiple layers or require a multi-phase learning process, neither of which are reminiscent of learning in the brain. Here, we introduce a new model, Bursting Cortico-Cortical Networks (BurstCCN), which solves these issues by integrating known properties of cortical networks namely bursting activity, short-term plasticity (STP) and dendrite-targeting interneurons. BurstCCN relies on burst multiplexing via connection-type-specific STP to propagate backprop-like error signals within deep cortical networks. These error signals are encoded at distal dendrites and induce burst-dependent plasticity as a result of excitatory-inhibitory top-down inputs. First, we demonstrate that our model can effectively backpropagate errors through multiple layers using a single-phase learning process. Next, we show both empirically and analytically that learning in our model approximates backprop-derived gradients. Finally, we demonstrate that our model is capable of learning complex image classification tasks (MNIST and CIFAR-10). Overall, …
Diffusion probabilistic models (DPMs) are emerging powerful generative models. Despite their high-quality generation performance, DPMs still suffer from their slow sampling as they generally need hundreds or thousands of sequential function evaluations (steps) of large neural networks to draw a sample. Sampling from DPMs can be viewed alternatively as solving the corresponding diffusion ordinary differential equations (ODEs). In this work, we propose an exact formulation of the solution of diffusion ODEs. The formulation analytically computes the linear part of the solution, rather than leaving all terms to black-box ODE solvers as adopted in previous works. By applying change-of-variable, the solution can be equivalently simplified to an exponentially weighted integral of the neural network. Based on our formulation, we propose DPM-Solver, a fast dedicated high-order solver for diffusion ODEs with the convergence order guarantee. DPM-Solver is suitable for both discrete-time and continuous-time DPMs without any further training. Experimental results show that DPM-Solver can generate high-quality samples in only 10 to 20 function evaluations on various datasets. We achieve 4.70 FID in 10 function evaluations and 2.87 FID in 20 function evaluations on the CIFAR10 dataset, and a 4~16x speedup compared with previous state-of-the-art training-free samplers on various datasets.
[ Hall J ]
Mean-Field Game (MFG) serves as a crucial mathematical framework in modeling the collective behavior of individual agents interacting stochastically with a large population. In this work, we aim at solving a challenging class of MFGs in which the differentiability of these interacting preferences may not be available to the solver, and the population is urged to converge exactly to some desired distribution. These setups are, despite being well-motivated for practical purposes, complicated enough to paralyze most (deep) numerical solvers. Nevertheless, we show that Schrödinger Bridge — as an entropy-regularized optimal transport model — can be generalized to accepting mean-field structures, hence solving these MFGs. This is achieved via the application of Forward-Backward Stochastic Differential Equations theory, which, intriguingly, leads to a computational framework with a similar structure to Temporal Difference learning. As such, it opens up novel algorithmic connections to Deep Reinforcement Learning that we leverage to facilitate practical training. We show that our proposed objective function provides necessary and sufficient conditions to the mean-field problem. Our method, named Deep Generalized Schrödinger Bridge (DeepGSB), not only outperforms prior methods in solving classical population navigation MFGs, but is also capable of solving 1000-dimensional opinion depolarization, setting a new state-of-the-art numerical solver …
[ Hall J ]
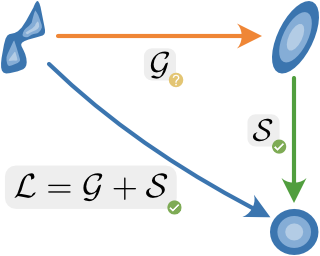
Coupling-based normalizing flows (e.g. RealNVP) are a popular family of normalizing flow architectures that work surprisingly well in practice. This calls for theoretical understanding. Existing work shows that such flows weakly converge to arbitrary data distributions. However, they make no statement about the stricter convergence criterion used in practice, the maximum likelihood loss. For the first time, we make a quantitative statement about this kind of convergence: We prove that all coupling-based normalizing flows perform whitening of the data distribution (i.e. diagonalize the covariance matrix) and derive corresponding convergence bounds that show a linear convergence rate in the depth of the flow. Numerical experiments demonstrate the implications of our theory and point at open questions.
[ Hall J ]
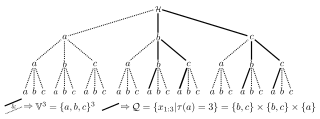
In reasoning about sequential events it is natural to pose probabilistic queries such as “when will event A occur next” or “what is the probability of A occurring before B”, with applications in areas such as user modeling, language models, medicine, and finance. These types of queries are complex to answer compared to next-event prediction, particularly for neural autoregressive models such as recurrent neural networks and transformers. This is in part due to the fact that future querying involves marginalization over large path spaces, which is not straightforward to do efficiently in such models. In this paper we introduce a general typology for predictive queries in neural autoregressive sequence models and show that such queries can be systematically represented by sets of elementary building blocks. We leverage this typology to develop new query estimation methods based on beam search, importance sampling, and hybrids. Across four large-scale sequence datasets from different application domains, as well as for the GPT-2 language model, we demonstrate the ability to make query answering tractable for arbitrary queries in exponentially-large predictive path-spaces, and find clear differences in cost-accuracy tradeoffs between search and sampling methods.
[ Hall J ]
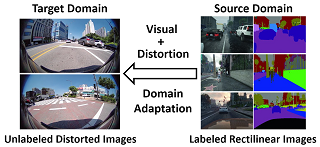
Distributional shifts in photometry and texture have been extensively studied for unsupervised domain adaptation, but their counterparts in optical distortion have been largely neglected. In this work, we tackle the task of unsupervised domain adaptation for semantic image segmentation where unknown optical distortion exists between source and target images. To this end, we propose a distortion-aware domain adaptation (DaDA) framework that boosts the unsupervised segmentation performance. We first present a relative distortion learning (RDL) approach that is capable of modeling domain shifts in fine-grained geometric deformation based on diffeomorphic transformation. Then, we demonstrate that applying additional global affine transformations to the diffeomorphically transformed source images can further improve the segmentation adaptation. Besides, we find that our distortion-aware adaptation method helps to enhance self-supervised learning by providing higher-quality initial models and pseudo labels. To evaluate, we propose new distortion adaptation benchmarks, where rectilinear source images and fisheye target images are used for unsupervised domain adaptation. Extensive experimental results highlight the effectiveness of our approach over state-of-the-art methods under unknown relative distortion across domains. Datasets and more information are available at https://sait-fdd.github.io/.
[ Hall J ]
In-context learning is the ability of a model to condition on a prompt sequence consisting of in-context examples (input-output pairs corresponding to some task) along with a new query input, and generate the corresponding output. Crucially, in-context learning happens only at inference time without any parameter updates to the model. While large language models such as GPT-3 exhibit some ability to perform in-context learning, it is unclear what the relationship is between tasks on which this succeeds and what is present in the training data. To investigate this, we consider the problem of training a model to in-context learn a function class (e.g., linear functions): given data derived from some functions in the class, can we train a model (e.g., a Transformer) to in-context learn most functions from that class? We show empirically that standard Transformers can be trained from scratch to perform in-context learning of linear functions---that is, the trained model is able to learn unseen linear functions from in-context examples with performance comparable to the optimal least squares estimator. In fact, in-context learning is possible even under two forms of distribution shift: (i) between the training data of the Transformer and inference-time prompts, and (ii) between the in-context …
[ Hall J ]
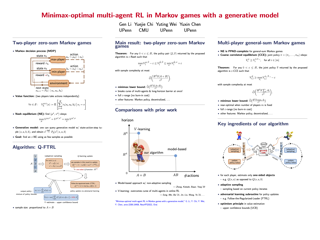
[ Hall J ]
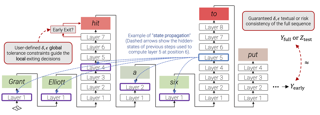
[ Hall J ]
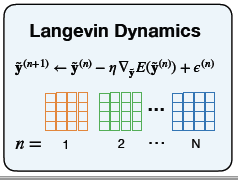
Many applications of text generation require incorporating different constraints to control the semantics or style of generated text. These constraints can be hard (e.g., ensuring certain keywords are included in the output) and soft (e.g., contextualizing the output with the left- or right-hand context). In this paper, we present Energy-based Constrained Decoding with Langevin Dynamics (COLD), a decoding framework which unifies constrained generation as specifying constraints through an energy function, then performing efficient differentiable reasoning over the constraints through gradient-based sampling. COLD decoding is a flexible framework that can be applied directly to off-the-shelf left-to-right language models without the need for any task-specific fine-tuning, as demonstrated through three challenging text generation applications: lexically-constrained generation, abductive reasoning, and counterfactual reasoning. Our experiments on these constrained generation tasks point to the effectiveness of our approach, both in terms of automatic and human evaluation.
[ Hall J ]
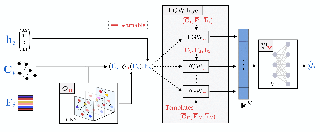
Current Graph Neural Networks (GNN) architectures generally rely on two important components: node features embedding through message passing, and aggregation with a specialized form of pooling. The structural (or topological) information is implicitly taken into account in these two steps. We propose in this work a novel point of view, which places distances to some learnable graph templates at the core of the graph representation. This distance embedding is constructed thanks to an optimal transport distance: the Fused Gromov-Wasserstein (FGW) distance, which encodes simultaneously feature and structure dissimilarities by solving a soft graph-matching problem. We postulate that the vector of FGW distances to a set of template graphs has a strong discriminative power, which is then fed to a non-linear classifier for final predictions. Distance embedding can be seen as a new layer, and can leverage on existing message passing techniques to promote sensible feature representations. Interestingly enough, in our work the optimal set of template graphs is also learnt in an end-to-end fashion by differentiating through this layer. After describing the corresponding learning procedure, we empirically validate our claim on several synthetic and real life graph classification datasets, where our method is competitive or surpasses kernel and GNN state-of-the-art …
[ Hall J ]
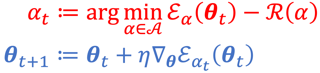
[ Hall J ]
[ Hall J ]
[ Hall J ]
We propose Active Surrogate Estimators (ASEs), a new method for label-efficient model evaluation. Evaluating model performance is a challenging and important problem when labels are expensive. ASEs address this active testing problem using a surrogate-based estimation approach that interpolates the errors of points with unknown labels, rather than forming a Monte Carlo estimator. ASEs actively learn the underlying surrogate, and we propose a novel acquisition strategy, XWED, that tailors this learning to the final estimation task. We find that ASEs offer greater label-efficiency than the current state-of-the-art when applied to challenging model evaluation problems for deep neural networks.
[ Hall J ]
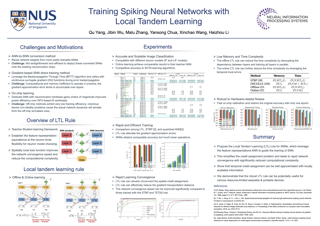
Spiking neural networks (SNNs) are shown to be more biologically plausible and energy efficient over their predecessors. However, there is a lack of an efficient and generalized training method for deep SNNs, especially for deployment on analog computing substrates. In this paper, we put forward a generalized learning rule, termed Local Tandem Learning (LTL). The LTL rule follows the teacher-student learning approach by mimicking the intermediate feature representations of a pre-trained ANN. By decoupling the learning of network layers and leveraging highly informative supervisor signals, we demonstrate rapid network convergence within five training epochs on the CIFAR-10 dataset while having low computational complexity. Our experimental results have also shown that the SNNs thus trained can achieve comparable accuracies to their teacher ANNs on CIFAR-10, CIFAR-100, and Tiny ImageNet datasets. Moreover, the proposed LTL rule is hardware friendly. It can be easily implemented on-chip to perform fast parameter calibration and provide robustness against the notorious device non-ideality issues. It, therefore, opens up a myriad of opportunities for training and deployment of SNN on ultra-low-power mixed-signal neuromorphic computing chips.
[ Hall J ]
[ Hall J ]
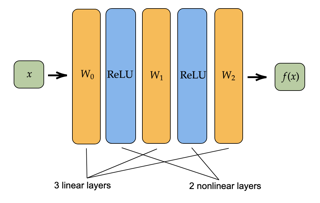
We give superpolynomial statistical query (SQ) lower bounds for learning two-hidden-layer ReLU networks with respect to Gaussian inputs in the standard (noise-free) model. No general SQ lower bounds were known for learning ReLU networks of any depth in this setting: previous SQ lower bounds held only for adversarial noise models (agnostic learning) (Kothari and Klivans 2014, Goel et al. 2020a, Diakonikolas et al. 2020a) or restricted models such as correlational SQ (Goel et al. 2020b, Diakonikolas et al. 2020b). Prior work hinted at the impossibility of our result: Vempala and Wilmes (2019) showed that general SQ lower bounds cannot apply to any real-valued family of functions that satisfies a simple non-degeneracy condition. To circumvent their result, we refine a lifting procedure due to Daniely and Vardi (2021) that reduces Boolean PAC learning problems to Gaussian ones. We show how to extend their technique to other learning models and, in many well-studied cases, obtain a more efficient reduction. As such, we also prove new cryptographic hardness results for PAC learning two-hidden-layer ReLU networks, as well as new lower bounds for learning constant-depth ReLU networks from membership queries.
[ Hall J ]
Similarity metrics such as representational similarity analysis (RSA) and centered kernel alignment (CKA) have been used to understand neural networks by comparing their layer-wise representations. However, these metrics are confounded by the population structure of data items in the input space, leading to inconsistent conclusions about the \emph{functional} similarity between neural networks, such as spuriously high similarity of completely random neural networks and inconsistent domain relations in transfer learning. We introduce a simple and generally applicable fix to adjust for the confounder with covariate adjustment regression, which improves the ability of CKA and RSA to reveal functional similarity and also retains the intuitive invariance properties of the original similarity measures. We show that deconfounding the similarity metrics increases the resolution of detecting functionally similar neural networks across domains. Moreover, in real-world applications, deconfounding improves the consistency between CKA and domain similarity in transfer learning, and increases the correlation between CKA and model out-of-distribution accuracy similarity.
[ Hall J ]
[ Hall J ]
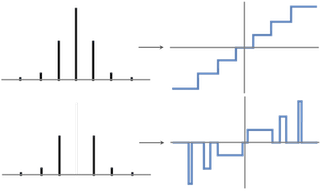
[ Hall J ]
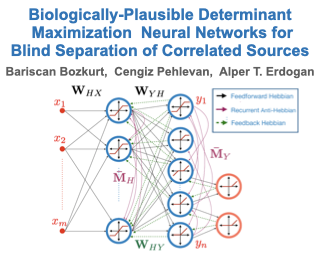
Extraction of latent sources of complex stimuli is critical for making sense of the world. While the brain solves this blind source separation (BSS) problem continuously, its algorithms remain unknown. Previous work on biologically-plausible BSS algorithms assumed that observed signals are linear mixtures of statistically independent or uncorrelated sources, limiting the domain of applicability of these algorithms. To overcome this limitation, we propose novel biologically-plausible neural networks for the blind separation of potentially dependent/correlated sources. Differing from previous work, we assume some general geometric, not statistical, conditions on the source vectors allowing separation of potentially dependent/correlated sources. Concretely, we assume that the source vectors are sufficiently scattered in their domains which can be described by certain polytopes. Then, we consider recovery of these sources by the Det-Max criterion, which maximizes the determinant of the output correlation matrix to enforce a similar spread for the source estimates. Starting from this normative principle, and using a weighted similarity matching approach that enables arbitrary linear transformations adaptable by local learning rules, we derive two-layer biologically-plausible neural network algorithms that can separate mixtures into sources coming from a variety of source domains. We demonstrate that our algorithms outperform other biologically-plausible BSS algorithms on correlated …
[ Hall J ]
[ Hall J ]
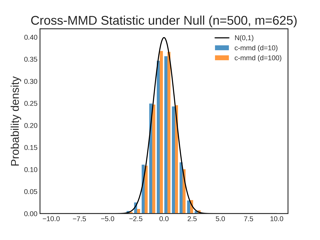
[ Hall J ]
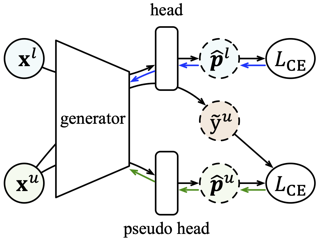
Deep neural networks achieve remarkable performances on a wide range of tasks with the aid of large-scale labeled datasets. Yet these datasets are time-consuming and labor-exhaustive to obtain on realistic tasks. To mitigate the requirement for labeled data, self-training is widely used in semi-supervised learning by iteratively assigning pseudo labels to unlabeled samples. Despite its popularity, self-training is well-believed to be unreliable and often leads to training instability. Our experimental studies further reveal that the bias in semi-supervised learning arises from both the problem itself and the inappropriate training with potentially incorrect pseudo labels, which accumulates the error in the iterative self-training process. To reduce the above bias, we propose Debiased Self-Training (DST). First, the generation and utilization of pseudo labels are decoupled by two parameter-independent classifier heads to avoid direct error accumulation. Second, we estimate the worst case of self-training bias, where the pseudo labeling function is accurate on labeled samples, yet makes as many mistakes as possible on unlabeled samples. We then adversarially optimize the representations to improve the quality of pseudo labels by avoiding the worst case. Extensive experiments justify that DST achieves an average improvement of 6.3% against state-of-the-art methods on standard semi-supervised learning benchmark datasets …
[ Hall J ]
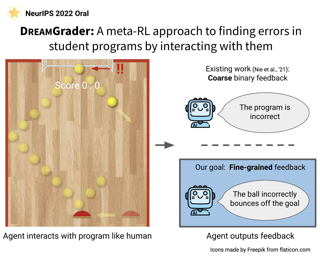
Developing interactive software, such as websites or games, is a particularly engaging way to learn computer science. However, teaching and giving feedback on such software is time-consuming — standard approaches require instructors to manually grade student-implemented interactive programs. As a result, online platforms that serve millions, like Code.org, are unable to provide any feedback on assignments for implementing interactive programs, which critically hinders students’ ability to learn. One approach toward automatic grading is to learn an agent that interacts with a student’s program and explores states indicative of errors via reinforcement learning. However, existing work on this approach only provides binary feedback of whether a program is correct or not, while students require finer-grained feedback on the specific errors in their programs to understand their mistakes. In this work, we show that exploring to discover errors can be cast as a meta-exploration problem. This enables us to construct a principled objective for discovering errors and an algorithm for optimizing this objective, which provides fine-grained feedback. We evaluate our approach on a set of over 700K real anonymized student programs from a Code.org interactive assignment. Our approach provides feedback with 94.3% accuracy, improving over existing approaches by 17.7% and coming within …
[ Hall J ]
The multiple-try Metropolis (MTM) algorithm is an extension of the Metropolis-Hastings (MH) algorithm by selecting the proposed state among multiple trials according to some weight function. Although MTM has gained great popularity owing to its faster empirical convergence and mixing than the standard MH algorithm, its theoretical mixing property is rarely studied in the literature due to its complex proposal scheme. We prove that MTM can achieve a mixing time bound smaller than that of MH by a factor of the number of trials under a general setting applicable to high-dimensional model selection problems with discrete state spaces. Our theoretical results motivate a new class of weight functions called locally balanced weight functions and guide the choice of the number of trials, which leads to improved performance over standard MTM algorithms. We support our theoretical results by extensive simulation studies and real data applications with several Bayesian model selection problems.
[ Hall J ]
The availability of large pre-trained models is changing the landscape of Machine Learning research and practice, moving from a "training from scratch" to a "fine-tuning'' paradigm. While in some applications the goal is to "nudge'' the pre-trained distribution towards preferred outputs, in others it is to steer it towards a different distribution over the sample space. Two main paradigms have emerged to tackle this challenge: Reward Maximization (RM) and, more recently, Distribution Matching (DM). RM applies standard Reinforcement Learning (RL) techniques, such as Policy Gradients, to gradually increase the reward signal. DM prescribes to first make explicit the target distribution that the model is fine-tuned to approximate. Here we explore the theoretical connections between the two paradigms and show that methods such as KL-control developed in the RM paradigm can also be construed as belonging to DM. We further observe that while DM differs from RM, it can suffer from similar training difficulties, such as high gradient variance. We leverage connections between the two paradigms to import the concept of baseline into DM methods. We empirically validate the benefits of adding a baseline on an array of controllable language generation tasks such as constraining topic, sentiment, and gender distributions in …
[ Hall J ]
Training foundation models, such as GPT-3 and PaLM, can be extremely expensive, often involving tens of thousands of GPUs running continuously for months. These models are typically trained in specialized clusters featuring fast, homogeneous interconnects and using carefully designed software systems that support both data parallelism and model/pipeline parallelism. Such dedicated clusters can be costly and difficult to obtain. Can we instead leverage the much greater amount of decentralized, heterogeneous, and lower-bandwidth interconnected compute? Previous works examining the heterogeneous, decentralized setting focus on relatively small models that can be trained in a purely data parallel manner. State-of-the-art schemes for model parallel foundation model training, such as Megatron and Deepspeed, only consider the homogeneous data center setting. In this paper, we present the first study of training large foundation models with model parallelism in a decentralized regime over a heterogeneous network. Our key technical contribution is a scheduling algorithm that allocates different computational “tasklets” in the training of foundation models to a group of decentralized GPU devices connected by a slow heterogeneous network. We provide a formal cost model and further propose an efficient evolutionary algorithm to find the optimal allocation strategy. We conduct extensive experiments that represent different scenarios for …
[ Hall J ]
[ Hall J ]
We introduce a multi-modes tensor clustering method that implements a fused version of the alternating least squares algorithm (Fused-Orth-ALS) for simultaneous tensor factorization and clustering. The statistical convergence rates of recovery and clustering are established when the data are a noise contaminated tensor with a latent low rank CP decomposition structure. Furthermore, we show that a modified alternating least squares algorithm can provably recover the true latent low rank factorization structure when the data form an asymmetric tensor with perturbation. Clustering consistency is also established. Finally, we illustrate the accuracy and computational efficient implementation of the Fused-Orth-ALS algorithm by using both simulations and real datasets.
[ Hall J ]
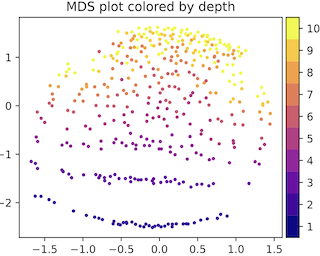
Comparing the representations learned by different neural networks has recently emerged as a key tool to understand various architectures and ultimately optimize them. In this work, we introduce GULP, a family of distance measures between representations that is explicitly motivated by downstream predictive tasks. By construction, GULP provides uniform control over the difference in prediction performance between two representations, with respect to regularized linear prediction tasks. Moreover, it satisfies several desirable structural properties, such as the triangle inequality and invariance under orthogonal transformations, and thus lends itself to data embedding and visualization. We extensively evaluate GULP relative to other methods, and demonstrate that it correctly differentiates between architecture families, converges over the course of training, and captures generalization performance on downstream linear tasks.
[ Hall J ]
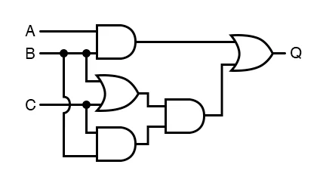
[ Hall J ]
We study a Markov matching market involving a planner and a set of strategic agents on the two sides of the market.At each step, the agents are presented with a dynamical context, where the contexts determine the utilities. The planner controls the transition of the contexts to maximize the cumulative social welfare, while the agents aim to find a myopic stable matching at each step. Such a setting captures a range of applications including ridesharing platforms. We formalize the problem by proposing a reinforcement learning framework that integrates optimistic value iteration with maximum weight matching. The proposed algorithm addresses the coupled challenges of sequential exploration, matching stability, and function approximation. We prove that the algorithm achieves sublinear regret.
[ Hall J ]

U-Net architectures are ubiquitous in state-of-the-art deep learning, however their regularisation properties and relationship to wavelets are understudied. In this paper, we formulate a multi-resolution framework which identifies U-Nets as finite-dimensional truncations of models on an infinite-dimensional function space. We provide theoretical results which prove that average pooling corresponds to projection within the space of square-integrable functions and show that U-Nets with average pooling implicitly learn a Haar wavelet basis representation of the data. We then leverage our framework to identify state-of-the-art hierarchical VAEs (HVAEs), which have a U-Net architecture, as a type of two-step forward Euler discretisation of multi-resolution diffusion processes which flow from a point mass, introducing sampling instabilities. We also demonstrate that HVAEs learn a representation of time which allows for improved parameter efficiency through weight-sharing. We use this observation to achieve state-of-the-art HVAE performance with half the number of parameters of existing models, exploiting the properties of our continuous-time formulation.
[ Hall J ]