Poster
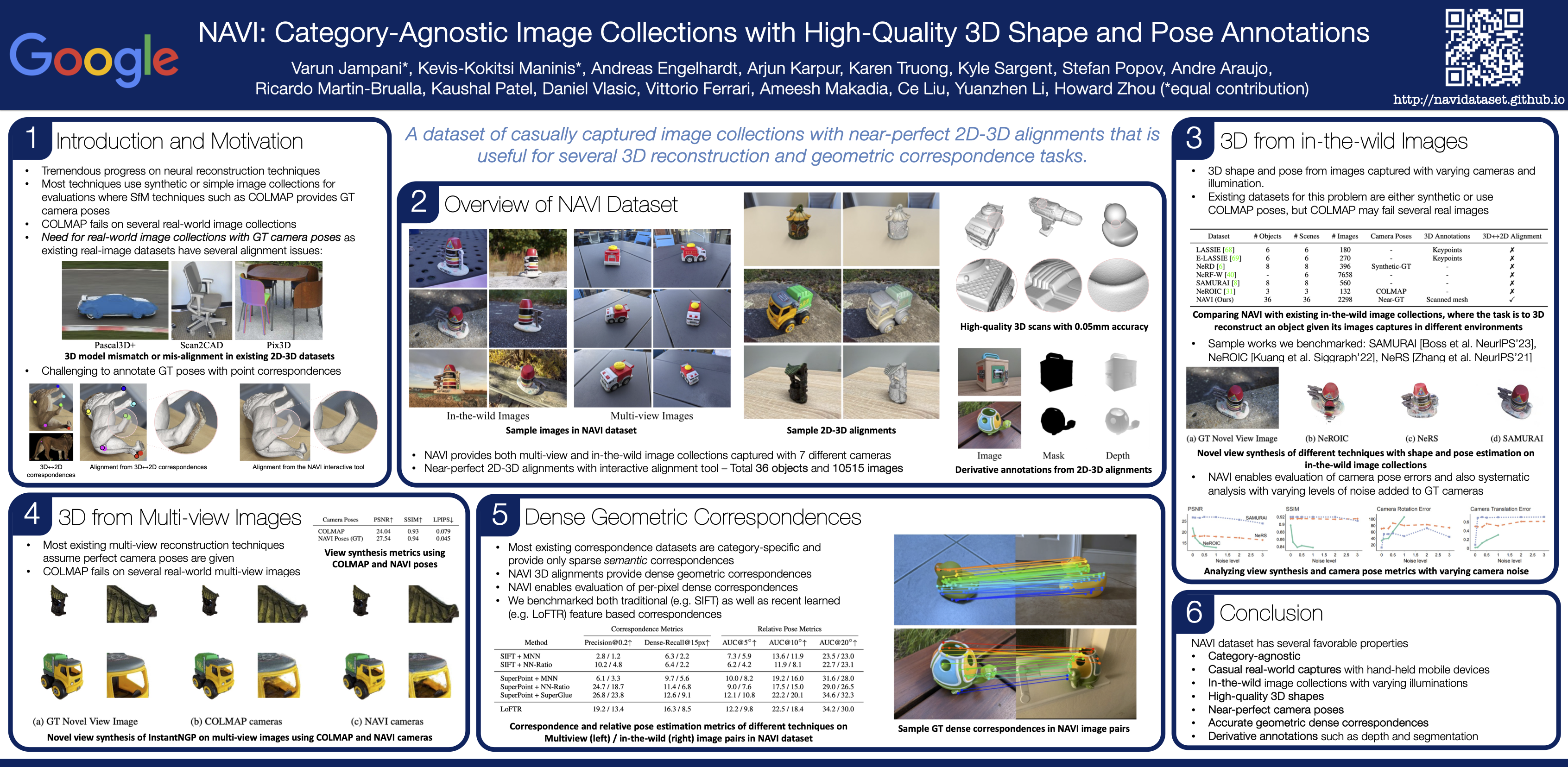
NAVI: Category-Agnostic Image Collections with High-Quality 3D Shape and Pose Annotations
Varun Jampani · Kevis-kokitsi Maninis · Andreas Engelhardt · Arjun Karpur · Karen Truong · Kyle Sargent · Stefan Popov · Andre Araujo · Ricardo Martin Brualla · Kaushal Patel · Daniel Vlasic · Vittorio Ferrari · Ameesh Makadia · Ce Liu · Yuanzhen Li · Howard Zhou
Great Hall & Hall B1+B2 (level 1) #217
{kind=link}
Recent advances in neural reconstruction enable high-quality 3D object reconstruction from casually captured image collections. Current techniques mostly analyze their progress on relatively simple image collections where SfM techniques can provide ground-truth (GT) camera poses. We note that SfM techniques tend to fail on in-the-wild image collections such as image search results with varying backgrounds and illuminations. To enable systematic research progress on 3D reconstruction from casual image captures, we propose `NAVI': a new dataset of category-agnostic image collections of objects with high-quality 3D scans along with per-image 2D-3D alignments providing near-perfect GT camera parameters. These 2D-3D alignments allow us to extract accurate derivative annotations such as dense pixel correspondences, depth and segmentation maps. We demonstrate the use of NAVI image collections on different problem settings and show that NAVI enables more thorough evaluations that were not possible with existing datasets. We believe NAVI is beneficial for systematic research progress on 3D reconstruction and correspondence estimation.