Poster
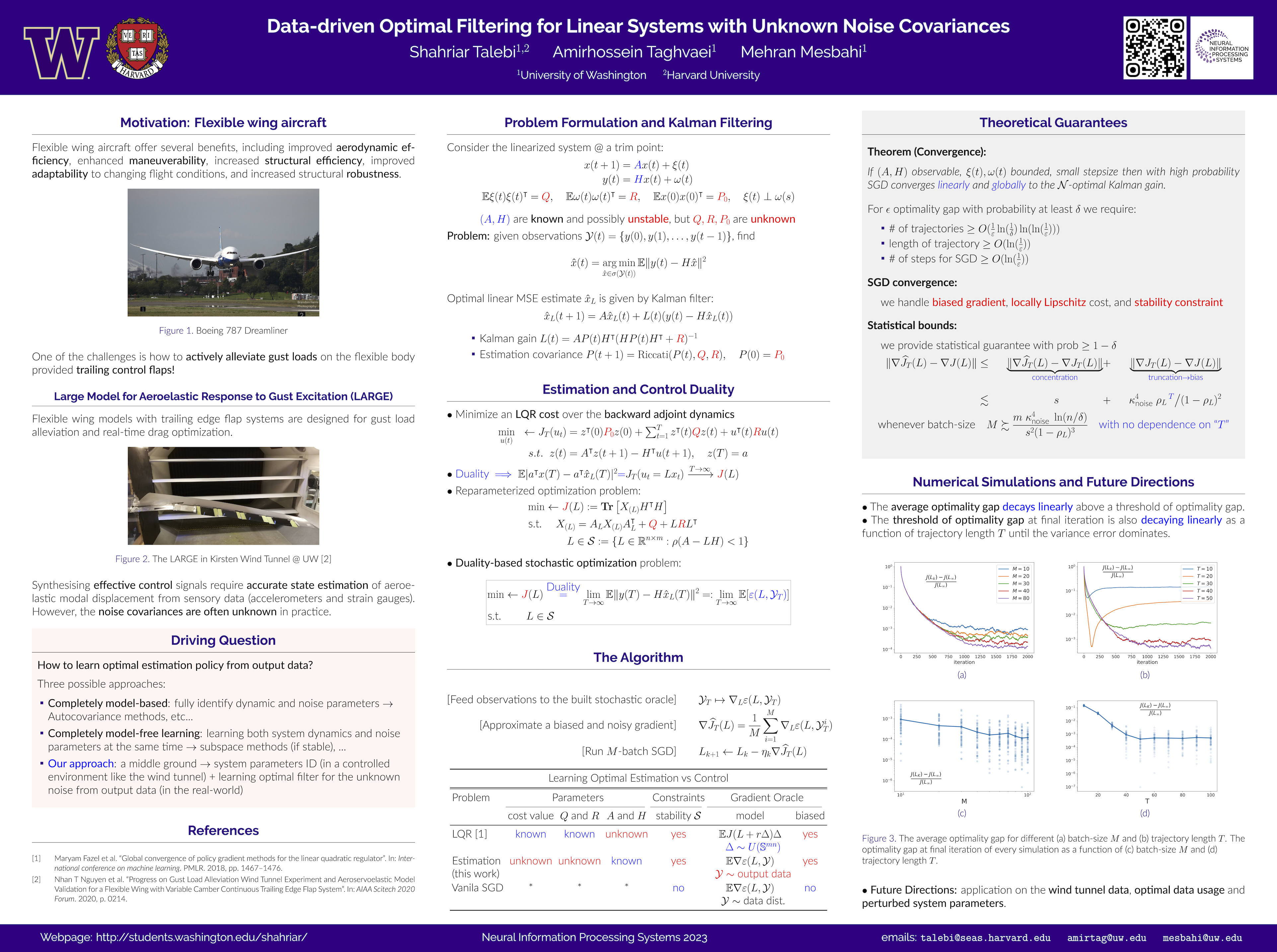
Data-driven Optimal Filtering for Linear Systems with Unknown Noise Covariances
Shahriar Talebi · Amirhossein Taghvaei · Mehran Mesbahi
Great Hall & Hall B1+B2 (level 1) #1908
{kind=link}
This paper examines learning the optimal filtering policy, known as the Kalman gain, for a linear system with unknown noise covariance matrices using noisy output data. The learning problem is formulated as a stochastic policy optimiza- tion problem, aiming to minimize the output prediction error. This formulation provides a direct bridge between data-driven optimal control and, its dual, op- timal filtering. Our contributions are twofold. Firstly, we conduct a thorough convergence analysis of the stochastic gradient descent algorithm, adopted for the filtering problem, accounting for biased gradients and stability constraints. Secondly, we carefully leverage a combination of tools from linear system theory and high-dimensional statistics to derive bias-variance error bounds that scale logarithmically with problem dimension, and, in contrast to subspace methods, the length of output trajectories only affects the bias term.