Poster
NeRF-IBVS: Visual Servo Based on NeRF for Visual Localization and Navigation
Yuanze Wang · Yichao Yan · Dianxi Shi · Wenhan Zhu · Jianqiang Xia · Tan Jeff · Songchang Jin · KE GAO · XIAOBO LI · XIAOBO LI · Xiaokang Yang
{kind=link}
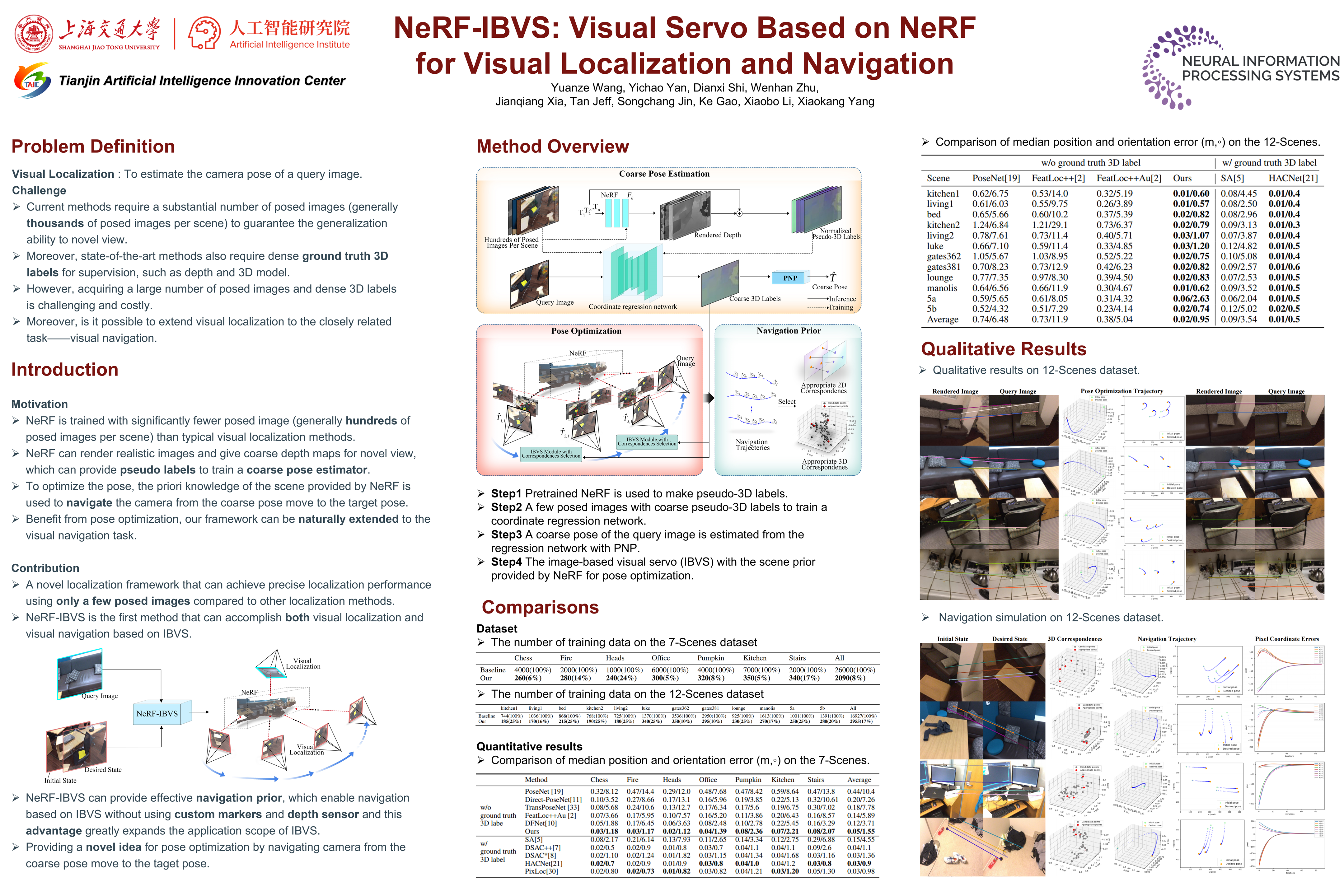
Visual localization is a fundamental task in computer vision and robotics. Training existing visual localization methods requires a large number of posed images to generalize to novel views, while state-of-the-art methods generally require dense ground truth 3D labels for supervision. However, acquiring a large number of posed images and dense 3D labels in the real world is challenging and costly. In this paper, we present a novel visual localization method that achieves accurate localization while using only a few posed images compared to other localization methods. To achieve this, we first use a few posed images with coarse pseudo-3D labels provided by NeRF to train a coordinate regression network. Then a coarse pose is estimated from the regression network with PNP. Finally, we use the image-based visual servo (IBVS) with the scene prior provided by NeRF for pose optimization. Furthermore, our method can provide effective navigation prior, which enable navigation based on IBVS without using custom markers and depth sensor. Extensive experiments on 7-Scenes and 12-Scenes datasets demonstrate that our method outperforms state-of-the-art methods under the same setting, with only 5\% to 25\% training data. Furthermore, our framework can be naturally extended to the visual navigation task based on IBVS, and its effectiveness is verified in simulation experiments.