Poster
Imitation Learning from Vague Feedback
Xin-Qiang Cai · Yu-Jie Zhang · Chao-Kai Chiang · Masashi Sugiyama
Great Hall & Hall B1+B2 (level 1) #1223
{kind=link}
Abstract:
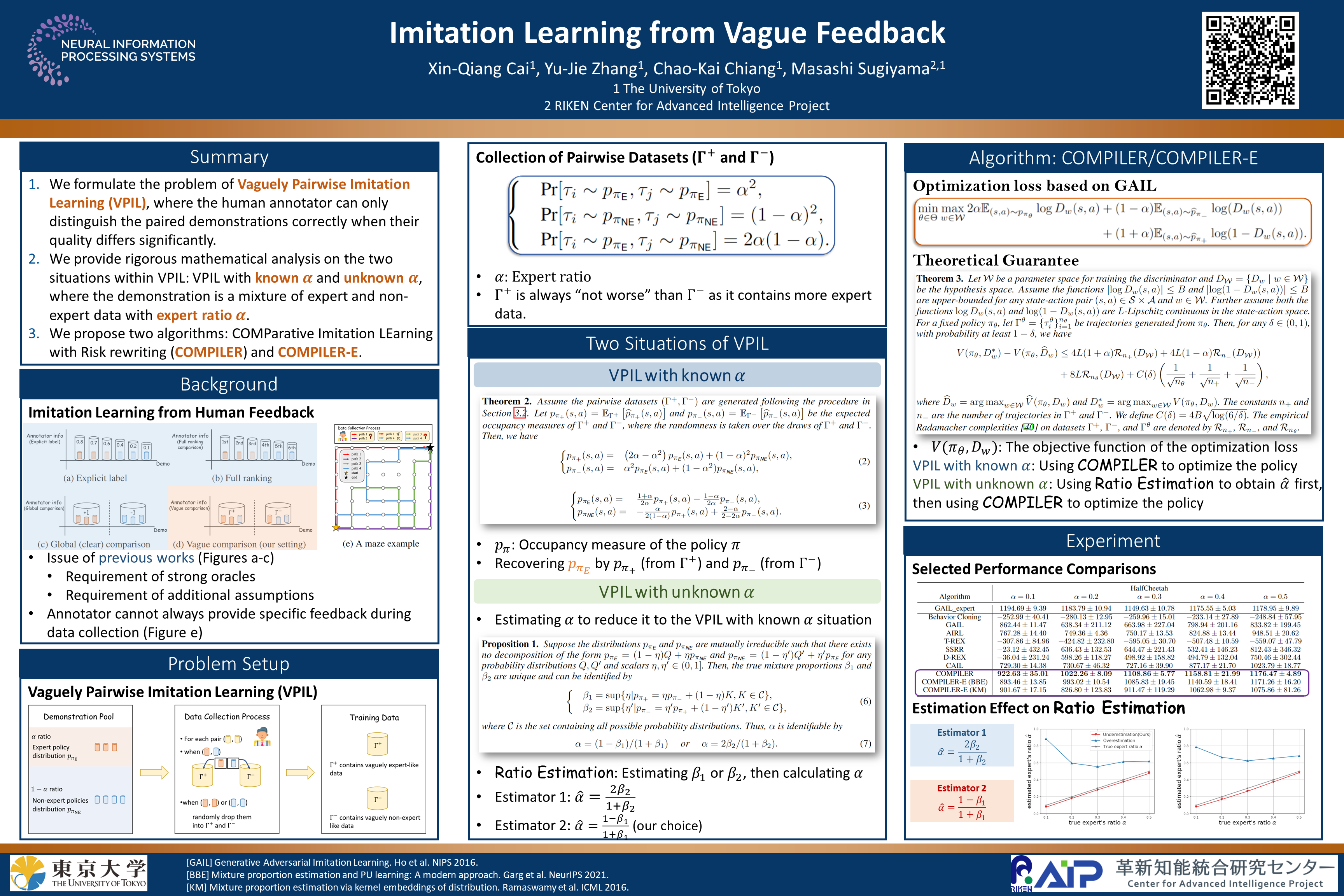
Imitation learning from human feedback studies how to train well-performed imitation agents with an annotator's relative comparison of two demonstrations (one demonstration is better/worse than the other), which is usually easier to collect than the perfect expert data required by traditional imitation learning. However, in many real-world applications, it is still expensive or even impossible to provide a clear pairwise comparison between two demonstrations with similar quality. This motivates us to study the problem of imitation learning with vague feedback, where the data annotator can only distinguish the paired demonstrations correctly when their quality differs significantly, i.e., one from the expert and another from the non-expert. By modeling the underlying demonstration pool as a mixture of expert and non-expert data, we show that the expert policy distribution can be recovered when the proportion $\alpha$ of expert data is known. We also propose a mixture proportion estimation method for the unknown $\alpha$ case. Then, we integrate the recovered expert policy distribution with generative adversarial imitation learning to form an end-to-end algorithm. Experiments show that our methods outperform standard and preference-based imitation learning methods on various tasks.
Chat is not available.