Poster
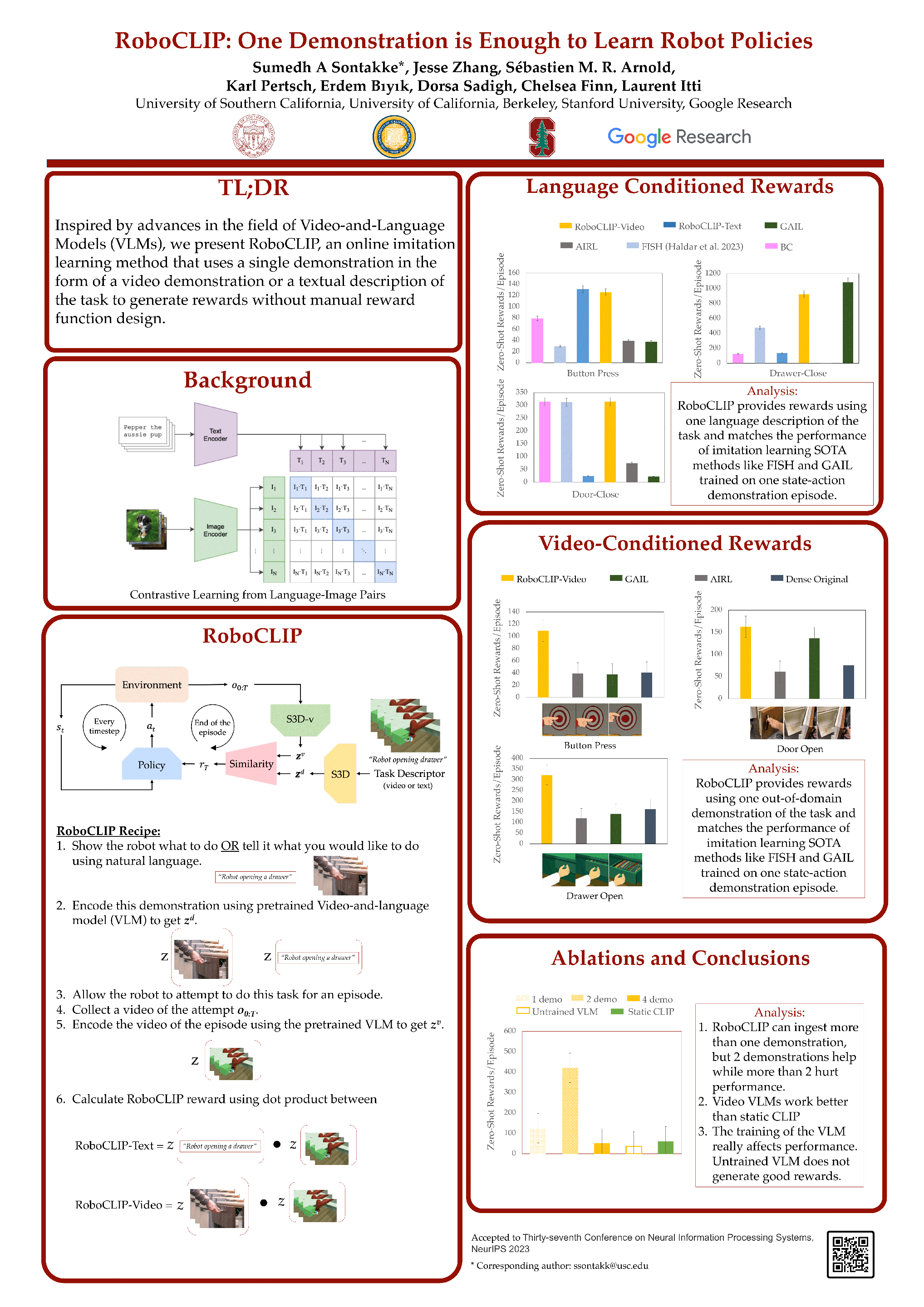
RoboCLIP: One Demonstration is Enough to Learn Robot Policies
Sumedh Sontakke · Jesse Zhang · Séb Arnold · Karl Pertsch · Erdem Bıyık · Dorsa Sadigh · Chelsea Finn · Laurent Itti
Great Hall & Hall B1+B2 (level 1) #1303
{kind=link}
Reward specification is a notoriously difficult problem in reinforcement learning, requiring extensive expert supervision to design robust reward functions. Imitation learning (IL) methods attempt to circumvent these problems by utilizing expert demonstrations instead of using an extrinsic reward function but typically require a large number of in-domain expert demonstrations. Inspired by advances in the field of Video-and-Language Models (VLMs), we present RoboCLIP, an online imitation learning method that uses a single demonstration (overcoming the large data requirement) in the form of a video demonstration or a textual description of the task to generate rewards without manual reward function design. Additionally, RoboCLIP can also utilize out-of-domain demonstrations, like videos of humans solving the task for reward generation, circumventing the need to have the same demonstration and deployment domains. RoboCLIP utilizes pretrained VLMs without any finetuning for reward generation. Reinforcement learning agents trained with RoboCLIP rewards demonstrate 2-3 times higher zero-shot performance than competing imitation learning methods on downstream robot manipulation tasks, doing so using only one video/text demonstration. Visit our website at https://sites.google.com/view/roboclip/home for experiment videos.