Poster
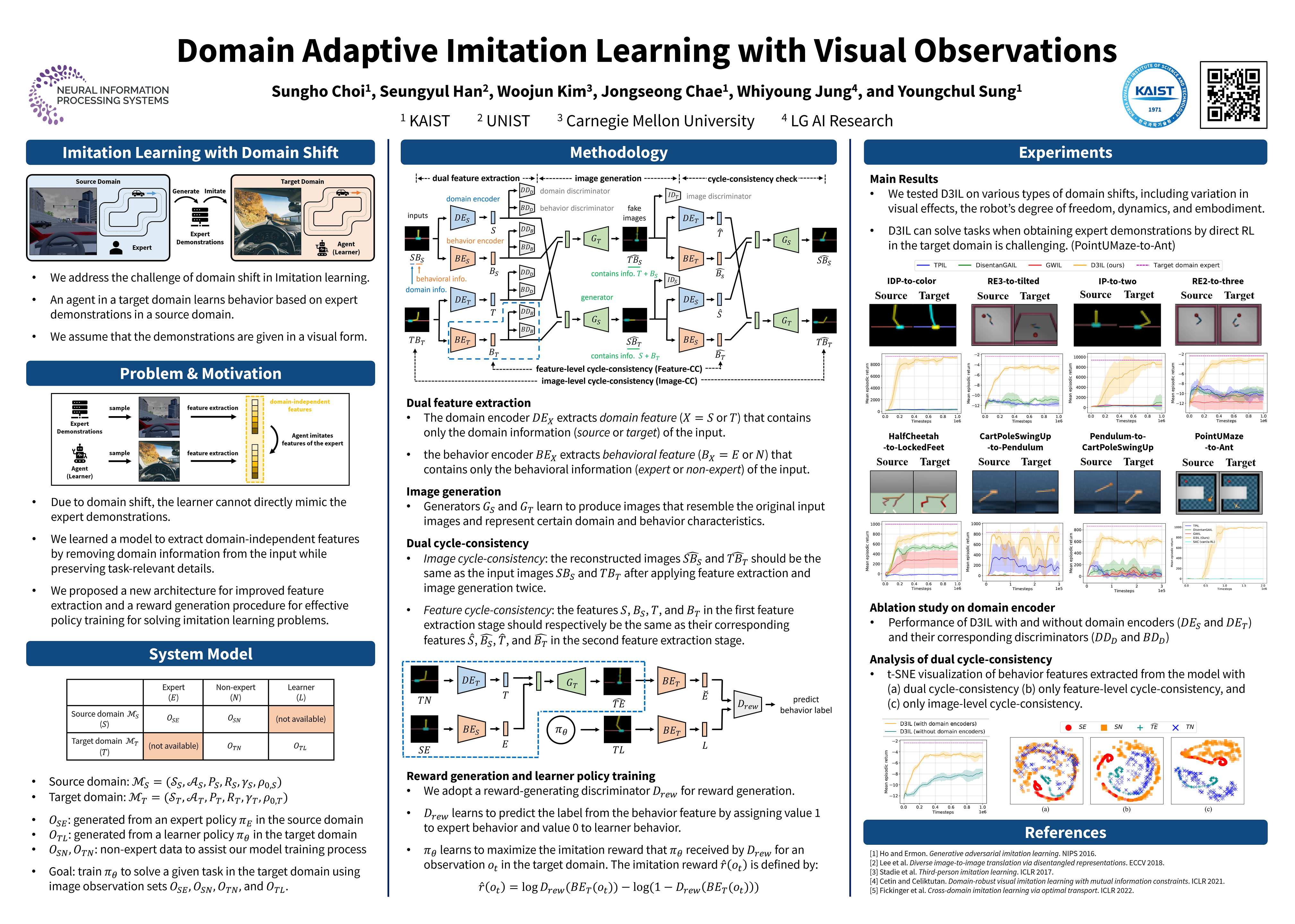
Domain Adaptive Imitation Learning with Visual Observation
Sungho Choi · Seungyul Han · Woojun Kim · Jongseong Chae · Whiyoung Jung · Youngchul Sung
Great Hall & Hall B1+B2 (level 1) #1406
{kind=link}
In this paper, we consider domain-adaptive imitation learning with visual observation, where an agent in a target domain learns to perform a task by observing expert demonstrations in a source domain. Domain adaptive imitation learning arises in practical scenarios where a robot, receiving visual sensory data, needs to mimic movements by visually observing other robots from different angles or observing robots of different shapes. To overcome the domain shift in cross-domain imitation learning with visual observation, we propose a novel framework for extracting domain-independent behavioral features from input observations that can be used to train the learner, based on dual feature extraction and image reconstruction. Empirical results demonstrate that our approach outperforms previous algorithms for imitation learning from visual observation with domain shift.