Poster
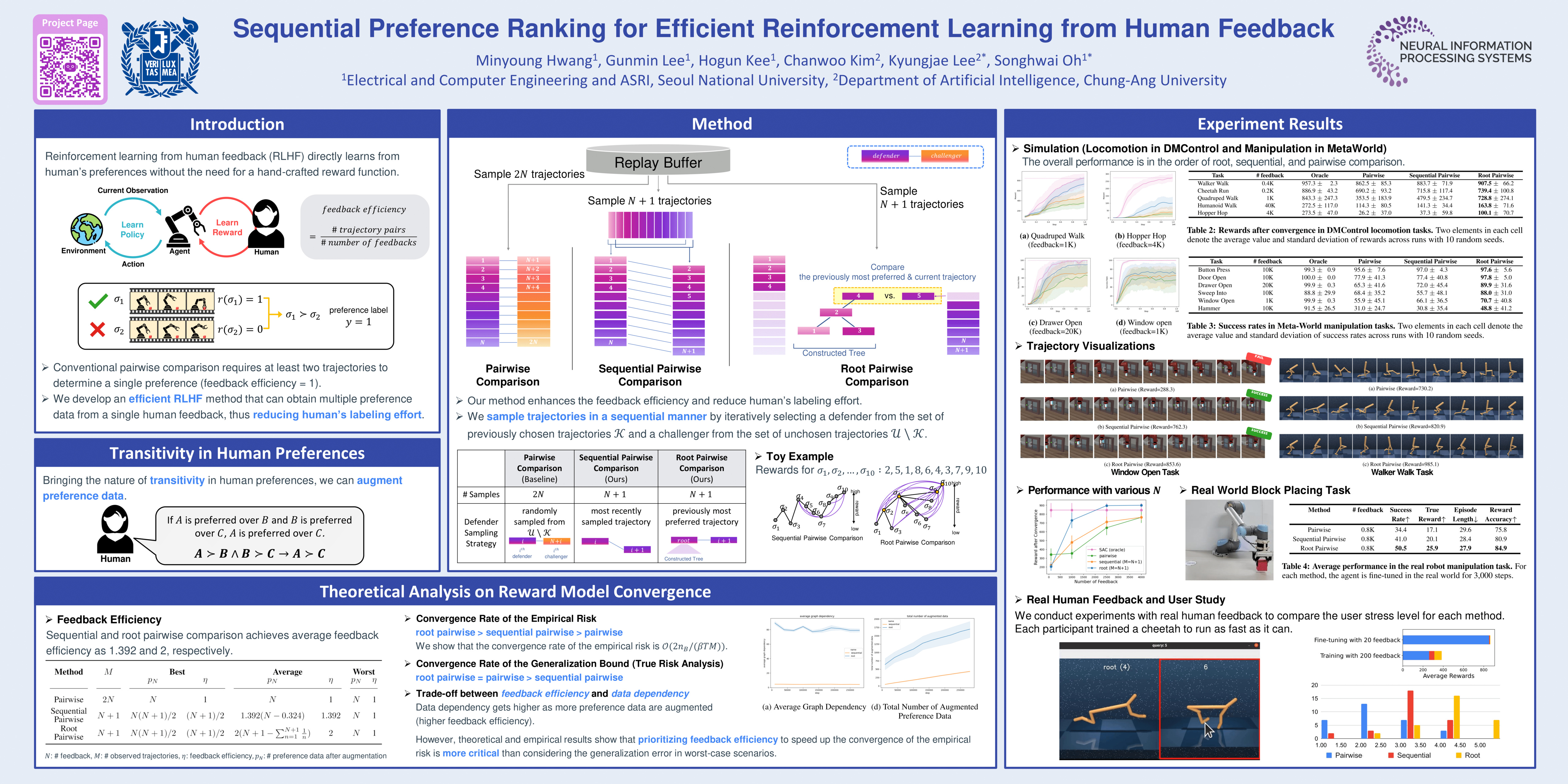
Sequential Preference Ranking for Efficient Reinforcement Learning from Human Feedback
Minyoung Hwang · Gunmin Lee · Hogun Kee · Chan Woo Kim · Kyungjae Lee · Songhwai Oh
Great Hall & Hall B1+B2 (level 1) #1300
{kind=link}
Abstract:
Reinforcement learning from human feedback (RLHF) alleviates the problem of designing a task-specific reward function in reinforcement learning by learning it from human preference. However, existing RLHF models are considered inefficient as they produce only a single preference data from each human feedback. To tackle this problem, we propose a novel RLHF framework called SeqRank, that uses sequential preference ranking to enhance the feedback efficiency. Our method samples trajectories in a sequential manner by iteratively selecting a defender from the set of previously chosen trajectories $\mathcal{K}$ and a challenger from the set of unchosen trajectories $\mathcal{U}\setminus\mathcal{K}$, where $\mathcal{U}$ is the replay buffer. We propose two trajectory comparison methods with different defender sampling strategies: (1) sequential pairwise comparison that selects the most recent trajectory and (2) root pairwise comparison that selects the most preferred trajectory from $\mathcal{K}$. We construct a data structure and rank trajectories by preference to augment additional queries. The proposed method results in at least 39.2% higher average feedback efficiency than the baseline and also achieves a balance between feedback efficiency and data dependency. We examine the convergence of the empirical risk and the generalization bound of the reward model with Rademacher complexity. While both trajectory comparison methods outperform conventional pairwise comparison, root pairwise comparison improves the average reward in locomotion tasks and the average success rate in manipulation tasks by 29.0% and 25.0%, respectively. The source code and the videos are provided in the supplementary material.
Chat is not available.