Poster
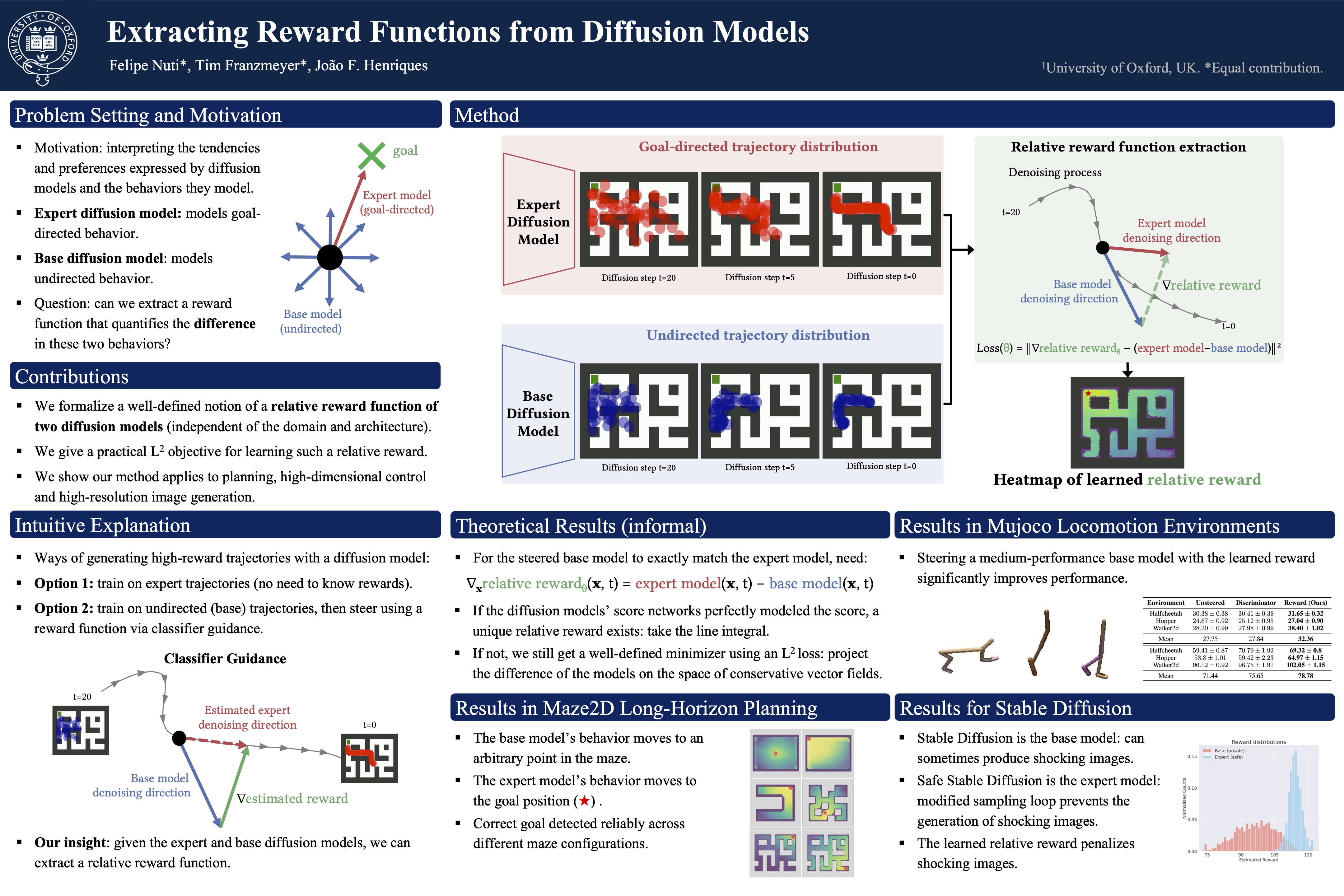
Extracting Reward Functions from Diffusion Models
Felipe Nuti · Tim Franzmeyer · João Henriques
Great Hall & Hall B1+B2 (level 1) #600
{kind=link}
Diffusion models have achieved remarkable results in image generation, and have similarly been used to learn high-performing policies in sequential decision-making tasks. Decision-making diffusion models can be trained on lower-quality data, and then be steered with a reward function to generate near-optimal trajectories.We consider the problem of extracting a reward function by comparing a decision-making diffusion model that models low-reward behavior and one that models high-reward behavior; a setting related to inverse reinforcement learning. We first define the notion of a \emph{relative reward function of two diffusion models} and show conditions under which it exists and is unique. We then devise a practical learning algorithm for extracting it by aligning the gradients of a reward function -- parametrized by a neural network -- to the difference in outputs of both diffusion models.Our method finds correct reward functions in navigation environments, and we demonstrate that steering the base model with the learned reward functions results in significantly increased performance in standard locomotion benchmarks.Finally, we demonstrate that our approach generalizes beyond sequential decision-making by learning a reward-like function from two large-scale image generation diffusion models. The extracted reward function successfully assigns lower rewards to harmful images.