Poster
Policy Optimization in a Noisy Neighborhood: On Return Landscapes in Continuous Control
Nate Rahn · Pierluca D'Oro · Harley Wiltzer · Pierre-Luc Bacon · Marc Bellemare
Great Hall & Hall B1+B2 (level 1) #1423
{kind=link}
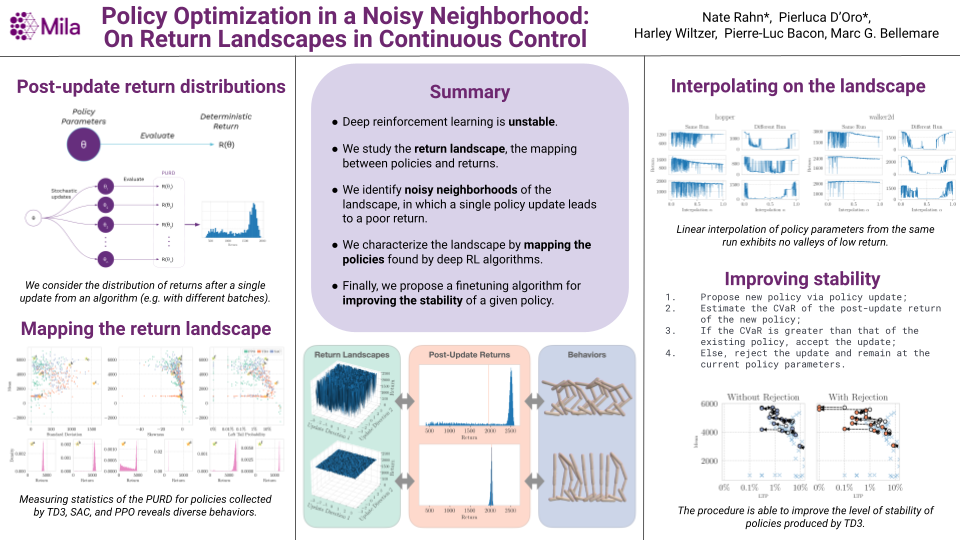
Deep reinforcement learning agents for continuous control are known to exhibit significant instability in their performance over time. In this work, we provide a fresh perspective on these behaviors by studying the return landscape: the mapping between a policy and a return. We find that popular algorithms traverse noisy neighborhoods of this landscape, in which a single update to the policy parameters leads to a wide range of returns. By taking a distributional view of these returns, we map the landscape, characterizing failure-prone regions of policy space and revealing a hidden dimension of policy quality. We show that the landscape exhibits surprising structure by finding simple paths in parameter space which improve the stability of a policy. To conclude, we develop a distribution-aware procedure which finds such paths, navigating away from noisy neighborhoods in order to improve the robustness of a policy. Taken together, our results provide new insight into the optimization, evaluation, and design of agents.