Poster
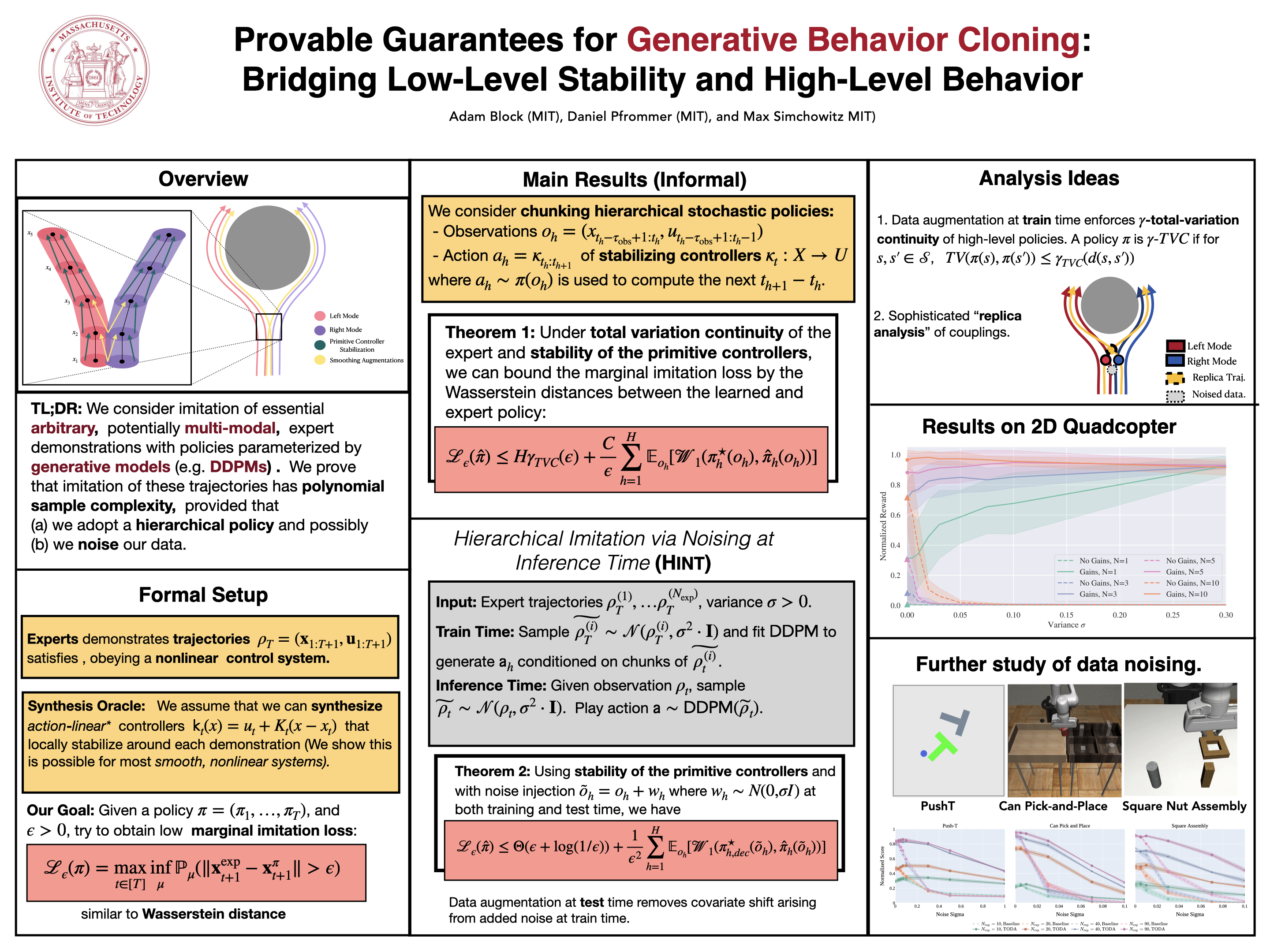
Provable Guarantees for Generative Behavior Cloning: Bridging Low-Level Stability and High-Level Behavior
Adam Block · Ali Jadbabaie · Daniel Pfrommer · Max Simchowitz · Russ Tedrake
Great Hall & Hall B1+B2 (level 1) #1427
{kind=link}
We propose a theoretical framework for studying behavior cloning of complex expert demonstrations using generative modeling.Our framework invokes low-level controllers - either learned or implicit in position-command control - to stabilize imitation around expert demonstrations. We show that with (a) a suitable low-level stability guarantee and (b) a powerful enough generative model as our imitation learner, pure supervised behavior cloning can generate trajectories matching the per-time step distribution of essentially arbitrary expert trajectories in an optimal transport cost. Our analysis relies on a stochastic continuity property of the learned policy we call "total variation continuity" (TVC). We then show that TVC can be ensured with minimal degradation of accuracy by combining a popular data-augmentation regimen with a novel algorithmic trick: adding augmentation noise at execution time. We instantiate our guarantees for policies parameterized by diffusion models and prove that if the learner accurately estimates the score of the (noise-augmented) expert policy, then the distribution of imitator trajectories is close to the demonstrator distribution in a natural optimal transport distance. Our analysis constructs intricate couplings between noise-augmented trajectories, a technique that may be of independent interest. We conclude by empirically validating our algorithmic recommendations, and discussing implications for future research directions for better behavior cloning with generative modeling.