Poster
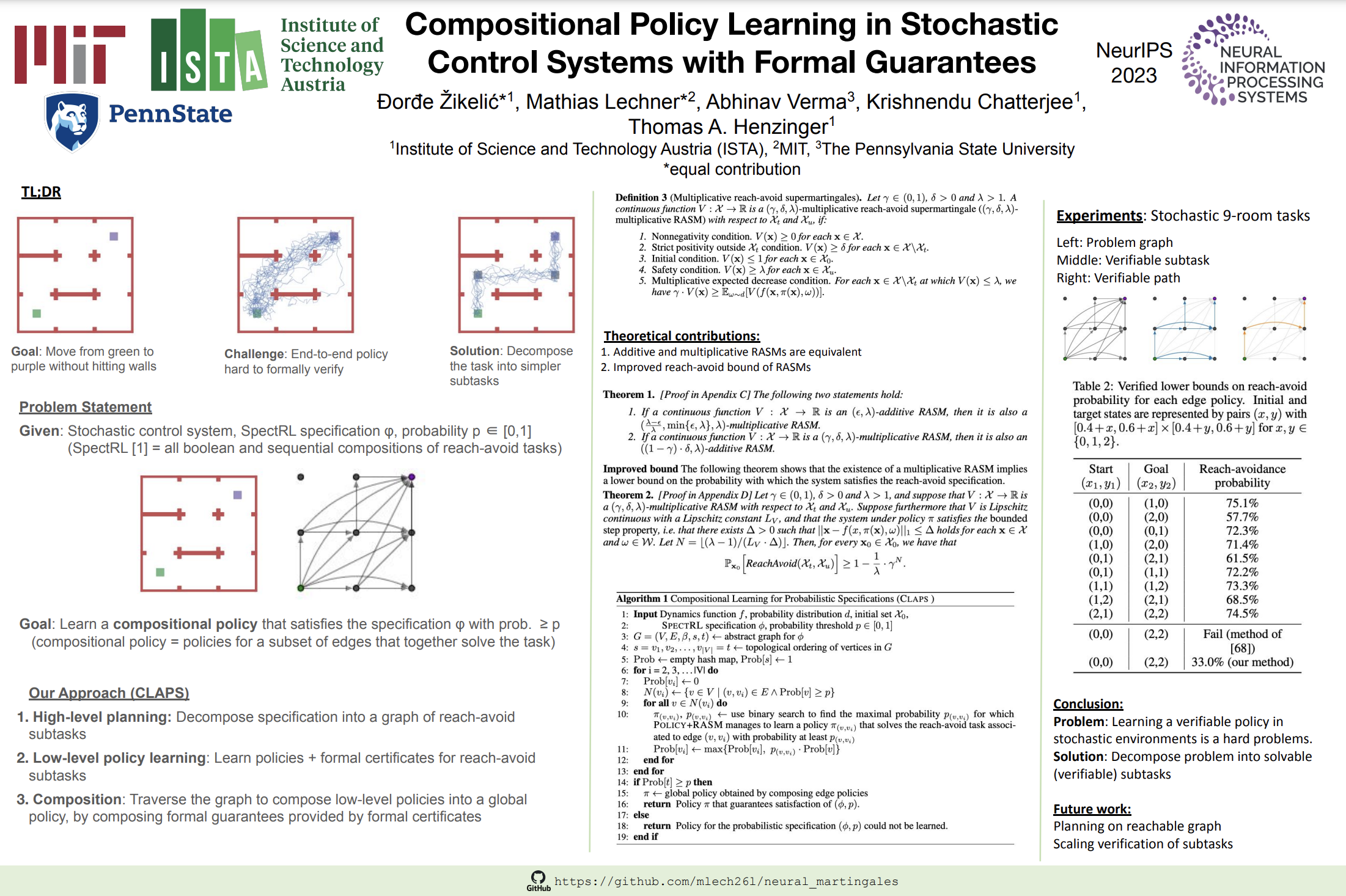
Compositional Policy Learning in Stochastic Control Systems with Formal Guarantees
Đorđe Žikelić · Đorđe Žikelić · Mathias Lechner · Abhinav Verma · Krishnendu Chatterjee · Thomas Henzinger
Great Hall & Hall B1+B2 (level 1) #1516
{kind=link}
Reinforcement learning has shown promising results in learning neural network policies for complicated control tasks. However, the lack of formal guarantees about the behavior of such policies remains an impediment to their deployment. We propose a novel method for learning a composition of neural network policies in stochastic environments, along with a formal certificate which guarantees that a specification over the policy's behavior is satisfied with the desired probability. Unlike prior work on verifiable RL, our approach leverages the compositional nature of logical specifications provided in SpectRL, to learn over graphs of probabilistic reach-avoid specifications. The formal guarantees are provided by learning neural network policies together with reach-avoid supermartingales (RASM) for the graph’s sub-tasks and then composing them into a global policy. We also derive a tighter lower bound compared to previous work on the probability of reach-avoidance implied by a RASM, which is required to find a compositional policy with an acceptable probabilistic threshold for complex tasks with multiple edge policies. We implement a prototype of our approach and evaluate it on a Stochastic Nine Rooms environment.